Steven J. Zaloga - Unmanned Aerial Vehicles: Robotic Air Warfare 1917–2007
Here you can read online Steven J. Zaloga - Unmanned Aerial Vehicles: Robotic Air Warfare 1917–2007 full text of the book (entire story) in english for free. Download pdf and epub, get meaning, cover and reviews about this ebook. year: 2011, publisher: Bloomsbury Publishing, genre: Computer. Description of the work, (preface) as well as reviews are available. Best literature library LitArk.com created for fans of good reading and offers a wide selection of genres:
Romance novel
Science fiction
Adventure
Detective
Science
History
Home and family
Prose
Art
Politics
Computer
Non-fiction
Religion
Business
Children
Humor
Choose a favorite category and find really read worthwhile books. Enjoy immersion in the world of imagination, feel the emotions of the characters or learn something new for yourself, make an fascinating discovery.
- Book:Unmanned Aerial Vehicles: Robotic Air Warfare 1917–2007
- Author:
- Publisher:Bloomsbury Publishing
- Genre:
- Year:2011
- Rating:4 / 5
- Favourites:Add to favourites
- Your mark:
Unmanned Aerial Vehicles: Robotic Air Warfare 1917–2007: summary, description and annotation
We offer to read an annotation, description, summary or preface (depends on what the author of the book "Unmanned Aerial Vehicles: Robotic Air Warfare 1917–2007" wrote himself). If you haven't found the necessary information about the book — write in the comments, we will try to find it.
Steven J. Zaloga: author's other books
Who wrote Unmanned Aerial Vehicles: Robotic Air Warfare 1917–2007? Find out the surname, the name of the author of the book and a list of all author's works by series.



Unmanned Aerial Vehicles: Robotic Air Warfare 1917–2007 — read online for free the complete book (whole text) full work
Below is the text of the book, divided by pages. System saving the place of the last page read, allows you to conveniently read the book "Unmanned Aerial Vehicles: Robotic Air Warfare 1917–2007" online for free, without having to search again every time where you left off. Put a bookmark, and you can go to the page where you finished reading at any time.
Font size:
Interval:
Bookmark:
STEVEN J ZALOGA ILLUSTRATED BY IAN PALMER
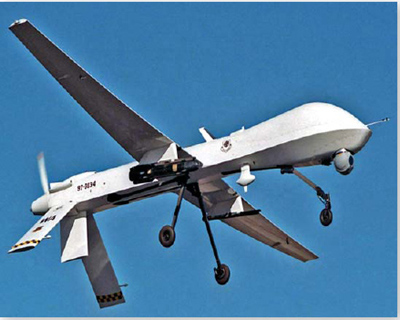
On the night of November 3, 2002, in the remote Marib desert of Yemen, an automobile carrying a senior Al Qaeda leader suddenly exploded. The automobile had been destroyed by a Hellfire missile fired from a Central Intelligence Agency (CIA) RQ-1A Predator drone flying thousands of feet above, controlled from a clandestine site hundreds of miles away in Djibouti. The attack ushered in a new age of robotic air warfare.
The use of robotic aircraft long predates the recent wars in the Middle East and can be traced back to before World War II. The first attempts at pilotless aircraft took place in 1917 with early experiments in radio control and inertial guidance. The first practical drone aircraft were used as targets for training antiaircraft gunners. World War II saw the first attempts to use assault drones in combat, but this technology evolved mainly in the direction of guided missiles. By the 1950s, drones had been adapted to conduct aerial reconnaissance, which would become their principal mission for the next half century. The first large-scale use of UAVs (unmanned aerial vehicles) was during the Vietnam War where they flew thousands of spy missions too hazardous for manned reconnaissance aircraft. With the arrival of new technologies such as digital cameras, satellite navigation, and computer microprocessors, the capabilities of the robotic aircraft have increased enormously. Their variety has increased as well, from mini-UAVs the size of a model airplane to endurance UAVs with the wingspan of a modern jumbo jet. Indeed, the capabilities of UAVs have developed to such a point that many air forces today are wondering if robotic aircraft will replace piloted aircraft in the next generation of warplanes. In spite of their advances, robotic aircraft are still in their infancy. This book will examine the dawn of robotic air warfare.
Remotely piloted aircraft first appeared during World War I, but the early efforts were stymied by the primitive guidance technology available. To pilot an aircraft remotely, some form of flight control system was needed as a substitute for the pilot. In these early days, UAV and guided missile development were intimately connected, since the challenges of flight guidance were essentially the same between both types of aerial vehicles. Guided missiles differ from UAVs in one crucial respect: UAVs are designed to return to base after their mission, while guided missiles explode when they impact their target.

Target drone technology nurtured early UAV development. The clearest example was the Vietnam-era Lightning Bug that stemmed from Teledyne-Ryans successful BQM-34 Firebee. (Teledyne-Ryan)

Will future air combat be dominated by robotic warplanes? This illustration shows Boeings X-45 UCAV (uninhabited combat air vehicle). (Boeing)
In 1909, the American inventor Elmer Sperry began designing gyroscopic devices to control the stability of aircraft in flight, these being ancestors to modern inertial navigation systems. The US Navy showed some interest in this concept to create an aerial torpedo, a precursor of modern cruise missiles. To improve the accuracy of the aerial torpedo beyond the very limited capabilities of early gyros, radio control was developed by the Western Electric Company. These two technologies, inertial navigation and radio control, would form the core of remotely piloted aircraft development over the next 80 years. The first flight of the Curtiss-Sperry Aerial Torpedo took place in December 1917. The US Army Air Force sponsored a competitor, the Liberty Eagle Aerial Torpedo developed by Charles Kettering. In Britain, Sopwith, DeHavilland, and the Royal Aircraft Factory all attempted similar programs, but none successfully flew. By 1918, it was evident that the technology of the day was not adequate to create a viable guided weapon, and the programs petered out. However, both the US Navy and Royal Navy realized that remotely piloted aircraft could serve as realistic target drones for antiaircraft gunners. As a result, target drones became the principal form of pilotless aircraft for nearly a half century.
The development of robotic aircraft between the two world wars mainly concentrated on primitive guided missiles and target drones. The Royal Aircraft Establishment began test flights of its RAE 1921 Target Aircraft in 1922 and adapted it as an aerial torpedo as the Larynx (Long Range Gun with Lynx Engine). In 1920, the US Army began sponsoring a program called the Messenger to develop an inexpensive aircraft that could be used to deliver messages between headquarters in place of runners. As a futuristic spin-off from this program, the Army approached Sperry to develop a robotic version called the Messenger Aerial Torpedo (MAT), which could remotely fly from one headquarters to another. Tests were conducted starting in 1920, and improvements were gradually added including radio control to supplement the inertial navigation system. Although a remarkable technical achievement and a milestone in the history of aviation navigation technology, the MAT concept was far beyond the capabilities of the day, and funding ended in 1926.
The Royal Navy was one of the early proponents of target drones, first flying the radio-controlled Fairey Queen in 1933 and then acquiring over 400 DH 82B Queen Bee target drones from 1934 to 1943, based on the ubiquitous Tiger Moth biplane trainer. The use of target drones in the United States emerged from the hobby industry in the 1930s with Reginald Denny and his Radioplane Company. Denny used his experience in designing remote control model airplanes to design his Radioplane-1 (RP-1), but the US military showed no interest until 1939, on the eve of war. Some 15,374 of the various Radioplane drones from RP-4 to RP-18 were built during World War II. The improved RP-19/OQ-19 appeared in 1946, and over 48,000 were built from 1946 to 1984. In 1952, Radioplane was acquired by Northrop and went on to form the core of one of the most successful of todays UAV firms.
In Germany, Dr. Fritz Gosslau of the Argus Motor Works developed the FZG-43 (Flakzielgerat-43, antiaircraft target device-43) for training Luftwaffe flak crews. In October 1939, Argus proposed a more revolutionary scheme using a larger radio-controlled drone dubbed Fernfeuer (Deep Fire). It could carry a one-ton bomb load and would be controlled by a piloted version of the same aircraft. On delivering its bomb, the Fernfeuer would return to base. This was not an aerial torpedo/cruise missile like the Sperry design but rather an ancestor of todays UCAV (uninhabited combat air vehicle). Although the Luftwaffe ignored the Fernfeuer, this program laid the groundwork for the FZG-76, better known as the V-1 cruise missile.
The US Navy had continued to experiment with larger radio-controlled aircraft as target drones in the late 1930s, and they were deployed with Utility Squadron Five (VJ-5) at Cape May, New Jersey, in March 1941 to train Navy antiaircraft gunners. The VJ-5 commander, Lt. Robert Jones, suggest using the drones as aerial rams to attack enemy fighters, eventually leading to the Navys Gorgon antiaircraft missile program. In the meantime, the Navy had been sponsoring the development of alternative flight control and navigation technologies including RCAs television camera and the Navy Research Labs (NRL) radar guidance system. These offered the possibility of guiding the drone much more accurately than radio control, and in 1941 a program was started to develop assault drones. These could be used either as guided missiles, impacting against an enemy target, or as UCAVs, dropping a weapon and then returning to base. The Navy ordered the production of the first TDN-1 assault drones by the Naval Aircraft Factory in March 1942. Since the drone was expendable, the Navy wanted a simpler and less expensive type, which was manufactured by Interstate Aviation as the TDR-1. The Navys top secret Operation
Font size:
Interval:
Bookmark:
Similar books «Unmanned Aerial Vehicles: Robotic Air Warfare 1917–2007»
Look at similar books to Unmanned Aerial Vehicles: Robotic Air Warfare 1917–2007. We have selected literature similar in name and meaning in the hope of providing readers with more options to find new, interesting, not yet read works.
Discussion, reviews of the book Unmanned Aerial Vehicles: Robotic Air Warfare 1917–2007 and just readers' own opinions. Leave your comments, write what you think about the work, its meaning or the main characters. Specify what exactly you liked and what you didn't like, and why you think so.