Mykel J. Kochenderfer - Algorithms for Decision Making
Here you can read online Mykel J. Kochenderfer - Algorithms for Decision Making full text of the book (entire story) in english for free. Download pdf and epub, get meaning, cover and reviews about this ebook. City: Cambridge, MA, year: 2022, publisher: The MIT Press, genre: Computer / Science. Description of the work, (preface) as well as reviews are available. Best literature library LitArk.com created for fans of good reading and offers a wide selection of genres:
Romance novel
Science fiction
Adventure
Detective
Science
History
Home and family
Prose
Art
Politics
Computer
Non-fiction
Religion
Business
Children
Humor
Choose a favorite category and find really read worthwhile books. Enjoy immersion in the world of imagination, feel the emotions of the characters or learn something new for yourself, make an fascinating discovery.

- Book:Algorithms for Decision Making
- Author:
- Publisher:The MIT Press
- Genre:
- Year:2022
- City:Cambridge, MA
- Rating:5 / 5
- Favourites:Add to favourites
- Your mark:
Algorithms for Decision Making: summary, description and annotation
We offer to read an annotation, description, summary or preface (depends on what the author of the book "Algorithms for Decision Making" wrote himself). If you haven't found the necessary information about the book — write in the comments, we will try to find it.
Mykel J. Kochenderfer: author's other books
Who wrote Algorithms for Decision Making? Find out the surname, the name of the author of the book and a list of all author's works by series.


Algorithms for Decision Making — read online for free the complete book (whole text) full work
Below is the text of the book, divided by pages. System saving the place of the last page read, allows you to conveniently read the book "Algorithms for Decision Making" online for free, without having to search again every time where you left off. Put a bookmark, and you can go to the page where you finished reading at any time.
Font size:
Interval:
Bookmark:
Algorithms for Decision Making
Mykel J. Kochenderfer
Tim A. Wheeler
Kyle H. Wray
The MIT Press
Cambridge, Massachusetts
London, England
2022 Massachusetts Institute of Technology
This work is subject to a Creative Commons CC-BY-NC-ND license. Subject to such license, all rights are reserved.
![]()
The MIT Press would like to thank the anonymous peer reviewers who provided comments on drafts of this book. The generous work of academic experts is essential for establishing the authority and quality of our publications. We acknowledge with gratitude the contributions of these otherwise uncredited readers.
This book was set in TEX Gyre Pagella by the authors in LATEX.
Library of Congress Cataloging-in-Publication Data
Names: Kochenderfer, Mykel J., 1980 author. | Wheeler, Tim A. (Tim Allan), author. | Wray, Kyle H., author.
Title: Algorithms for decision making / Mykel J. Kochenderfer, Tim A. Wheeler, Kyle H. Wray.
Description: Cambridge: Massachusetts Institute of Technology, [2022] | Includes bibliographical references and index.
Identifiers: LCCN 2021038701 | ISBN 9780262047012 (hardcover)
Subjects: LCSH: Decision support systemsMathematics. | Algorithms.
Classification: LCC T58.62.K666 2022 | DDC 658.4/03dc23
LC record available at https://lccn.loc.gov/2021038701
d_r0
To our families
List of Figures
List of Tables
This book provides a broad introduction to algorithms for decision making under uncertainty. We cover a wide variety of topics related to decision making, introducing the underlying mathematical problem formulations and the algorithms for solving them. Figures, examples, and exercises are provided to convey the intuition behind the various approaches.
This book is intended for advanced undergraduates and graduate students, as well as professionals. It requires some mathematical maturity and assumes prior exposure to multivariable calculus, linear algebra, and probability concepts. Some review material is provided in the appendices. Disciplines where the book would be especially useful include mathematics, statistics, computer science, aerospace, electrical engineering, and operations research.
Fundamental to this textbook are the algorithms, which are all implemented in the Julia programming language. We have found this language to be ideal for specifying algorithms in human-readable form. The priority in the design of the algorithmic implementations was interpretability rather than efficiency. Industrial applications, for example, may benefit from alternative implementations. Permission is granted, free of charge, to use the code snippets associated with this book, subject to the condition that the source of the code is acknowledged.
MYKEL J. KOCHENDERFER
TIM A. WHEELER
KYLE H. WRAY
Stanford, California
February 28, 2022
This textbook has grown from a course on decision making under uncertainty taught at Stanford. We are grateful to the students and teaching assistants who have helped shape the course over the past six years.
The authors wish to thank the many individuals who have provided valuable feedback on early drafts of our manuscript, including Dylan Asmar, Drew Bagnell, Safa Bakhshi, Edward Balaban, Jean Betterton, Raunak Bhattacharyya, Kelsey Bing, Maxime Bouton, Austin Chan, Simon Chauvin, Shushman Choudhury, Jon Cox, Matthew Daly, Victoria Dax, Richard Dewey, Dea Dressel, Ben Duprey, Torstein Eliassen, Johannes Fischer, Rushil Goradia, Jayesh Gupta, Arec Jamgochian, Rohan Kapre, Mark Koren, Liam Kruse, Tor Lattimore, Bernard Lange, Ritchie Lee, Sheng Li, Michael Littman, Robert Moss, Joshua Ott, Oriana Peltzer, Francesco Piccoli, Jeffrey Sarnoff, Marc Schlichting, Ransalu Senanayake, Chelsea Sidrane, Chris Strong, Zach Sunberg, Abiy Teshome, Alexandros Tzikas, Kemal Ure, Josh Wolff, Anl Yldz, and Zongzhang Zhang. We also would like to thank Sydney Katz, Kunal Menda, and Ayan Mukhopadhyay for their contributions to the discussion in chapter 1. Ross Alexander produced many of the exercises throughout the book. It has been a pleasure working with Elizabeth Swayze from the MIT Press in preparing this manuscript for publication.
The style of this book was inspired by Edward Tufte. Among other stylistic elements, we adopted his wide margins and use of small multiples. The typesetting of this book is based on the Tufte-LaTeX package by Kevin Godby, Bil Kleb, and Bill Wood. The books color scheme was adapted from the Monokai theme by Jon Skinner of Sublime Text ( For plots, we use the viridis color map defined by Stfan van der Walt and Nathaniel Smith.
We have also benefited from the various open-source packages on which this textbook depends (see appendix G). The typesetting of the code was done with the help of pythontex, which is maintained by Geoffrey Poore. The typeface used for the algorithms is JuliaMono (github.com/cormullion/juliamono). The plotting was handled by pgfplots, which is maintained by Christian Feuersnger.
B. Wong, Points of View: Color Blindness, Nature Methods, vol. 8, no. 6, pp. 441442, 2011.
Many important problems involve decision making under uncertainty, including aircraft collision avoidance, wildfire management, and disaster response. When designing automated decision-making systems or decision-support systems, it is important to account for various sources of uncertainty while carefully balancing multiple objectives. We will discuss these challenges from a computational perspective, aiming to provide the theory behind decision-making models and computational approaches. This chapter introduces the problem of decision making under uncertainty, provides some examples of applications, and outlines the space of computational approaches. It then summarizes how various disciplines have contributed to our understanding of intelligent decision making and highlights areas of potential societal impact. We conclude with an outline of the remainder of the book.
An agent is an entity that acts based on observations of its environment. Agents may be physical entities, like humans or robots, or they may be nonphysical entities, such as decision support systems that are implemented entirely in software. As shown in , the interaction between the agent and the environment follows an observe-act cycle or loop.
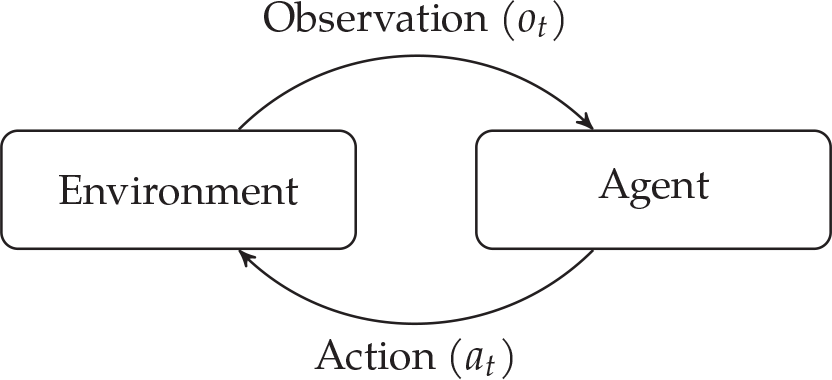
. Interaction between an agent and its environment.
The agent at time t receives an observation of the environment, denoted as ot. Observations may be made, for example, through a biological sensory process, as in humans, or by a sensor system, like radar in an air traffic control system. Observations are often incomplete or noisy; humans may not see an approaching aircraft or a radar system might miss a detection due to electromagnetic interference. The agent then chooses an action at through some decision-making process. This action, such as sounding an alert, may have a nondeterministic effect on the environment.
Font size:
Interval:
Bookmark:
Similar books «Algorithms for Decision Making»
Look at similar books to Algorithms for Decision Making. We have selected literature similar in name and meaning in the hope of providing readers with more options to find new, interesting, not yet read works.
Discussion, reviews of the book Algorithms for Decision Making and just readers' own opinions. Leave your comments, write what you think about the work, its meaning or the main characters. Specify what exactly you liked and what you didn't like, and why you think so.