Yulianto - Best Arduino Automation Project: Arduino Project Ideas for Automated System
Here you can read online Yulianto - Best Arduino Automation Project: Arduino Project Ideas for Automated System full text of the book (entire story) in english for free. Download pdf and epub, get meaning, cover and reviews about this ebook. year: 2017, genre: Home and family. Description of the work, (preface) as well as reviews are available. Best literature library LitArk.com created for fans of good reading and offers a wide selection of genres:
Romance novel
Science fiction
Adventure
Detective
Science
History
Home and family
Prose
Art
Politics
Computer
Non-fiction
Religion
Business
Children
Humor
Choose a favorite category and find really read worthwhile books. Enjoy immersion in the world of imagination, feel the emotions of the characters or learn something new for yourself, make an fascinating discovery.

- Book:Best Arduino Automation Project: Arduino Project Ideas for Automated System
- Author:
- Genre:
- Year:2017
- Rating:4 / 5
- Favourites:Add to favourites
- Your mark:
Best Arduino Automation Project: Arduino Project Ideas for Automated System: summary, description and annotation
We offer to read an annotation, description, summary or preface (depends on what the author of the book "Best Arduino Automation Project: Arduino Project Ideas for Automated System" wrote himself). If you haven't found the necessary information about the book — write in the comments, we will try to find it.
Yulianto: author's other books
Who wrote Best Arduino Automation Project: Arduino Project Ideas for Automated System? Find out the surname, the name of the author of the book and a list of all author's works by series.


Best Arduino Automation Project: Arduino Project Ideas for Automated System — read online for free the complete book (whole text) full work
Below is the text of the book, divided by pages. System saving the place of the last page read, allows you to conveniently read the book "Best Arduino Automation Project: Arduino Project Ideas for Automated System" online for free, without having to search again every time where you left off. Put a bookmark, and you can go to the page where you finished reading at any time.
Font size:
Interval:
Bookmark:
Index Of Contents
Wouldnt it's exquisite to water your greenhouse with out leaving your chair, or open your garage door remotely?
Rather than permit your Arduino sit down on a shelf amassing dust (were all responsible of that occasionally), have interaction it as the key issue of some home automation projects. Weve compiled this list of 5 to show you simply what is feasible.
One of the super matters about Arduino home automation projects is that with the addition of an Ethernet protect, you can flip your Arduino into a web-connected tool, able to transfer lighting, TVs, coffee machines pretty a lot something you may think of on and off, the use of both a browser-primarily based interface or a timer. See my littleBits infra-crimson mild transfer challenge for a evidence of idea the identical can be completed with an Arduino.
Layout and take a look at a manipulate device for a provider raise working for four floors. The microcontroller (ATMega2560) is used to decide which contactor to provide strength for you to set off the carry motor to transport the raise up or down by means of checking the floor the lift is currently at. The control gadget ought to be additionally capable of prevent the energy to the lift whilst it has reached the desired floor. An integral safety factor must be implemented to continually close the lift door earlier than transferring up or down. The manage device is successfully able to determine which contactor wishes to be powered which will circulate the elevate to the desired ground. The gadget is able to manipulate the protection carry door motor for you to near the door whilst the elevate wishes to transport and open the door automatically while it has reached the specified ground.
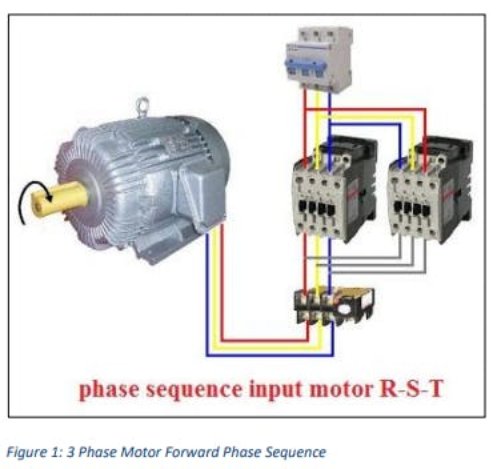
A three section motor is used in this software as this is requires a powerful motor which could cope with a heavy load. The 3 section motor is powered via the primary 3 phase strength. power through the mains runs thru two fundamental contactors. while the primary contactor is switched on and the second contactor is switched off, power runs via the primary contactor to the winding of the motor which moves the motor inside the forward direction.
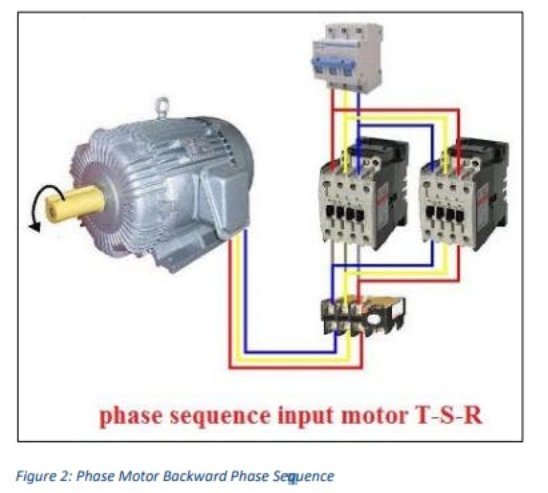
when the second one contactor is switched on and the primary contactor is switched off, power runs thru the second contactor to the winding of the motor which actions the motor within the backward direction. word that the wiring is different for the reverse course.
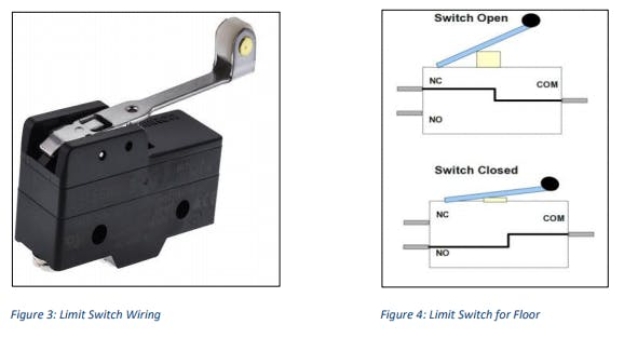
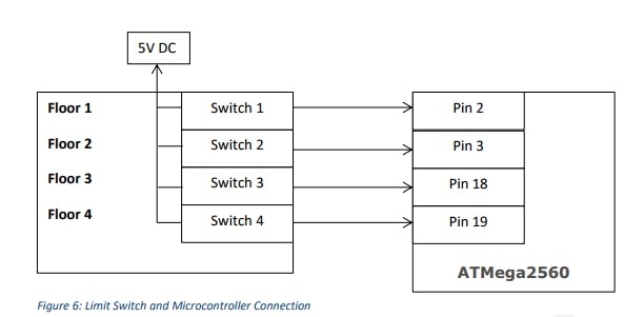
so one can stumble on the floor the raise is presently at, a restrict switch is used. because the elevate movements up or down it closes and opens a restriction turn on each floor. when the lift is at a specific ground the limit floor at that particular floor is closed indicating to the microcontroller the ground the elevate is at. because the carry actions the limit switch opens indicating to the microcontroller that the lift is transferring.
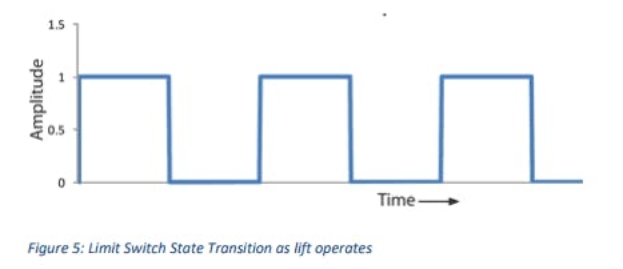
The transition from low to excessive signal produced with the aid of the limit transfer whilst the lift moves through a floor takes place in a fragment of a second and regularly too quick to be detected by way of the microcontroller. The restriction switches are related to a 5V DC supply and the output from the NO(commonly Open) terminal is hooked up to an IO pin of the microcontroller. 4 limit switches at four flooring ship facts to the microcontroller. This enables the microcontroller to determine the ground the elevate is at with the aid of checking which pin went from low to excessive. The transition of a restrict switchs nation is proven inside the diagram underneath:
The problematic challenge is to permit the microcontroller to hit upon the transition from low to excessive. There are two methods to method this problem. First technique is to decide if a restrict transfer pin is going excessive in the loop characteristic using an if circumstance. the program basically whilst executing other code continually tests if a pin is going high. This takes up a variety of reminiscence as the application is continuously searching out a high sign from a limit transfer pin. every other problem is that occasionally the program might leave out this transition as the loop feature turned into executing a few other code while a transition takes place. if you want to avoid those troubles, Interrupts are used. Interrupts essentially pause the execution of code and execute a separate feature while a selected interrupt circumstance is satisfied. This is right for the carry operation. whilst a restriction transfer pin goes from low to excessive an interrupt characteristic is executed and this function tests if the lift is on the modern-day floor and stops the lift or allow it to move further. for the reason that application is forced to execute the interrupt feature whilst a restrict switch is switched the system can ensure that this system does now not intentionally skip detecting a ground.
The microcontroller used for this application is the Arduino Mega 2560 which has 6 digital pins usable for interrupts which is ideal to use for the 4 flooring. the first parameter to attachInterrupt is an interrupt quantity. usually you have to use digitalPinToInterrupt(pin) to translate the actual digital pin to the precise interrupt range. as an instance, in case you connect with pin 3, use digitalPinToInterrupt(3) because the first parameter to attachInterrupt. it's also critical to note that the put off() function receivedt work in the function accomplished by way of the Interrupt provider habitual(ISR).
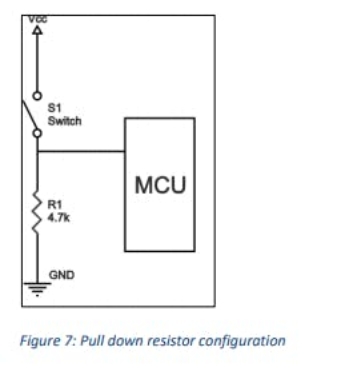
The diagram above shows how the restriction switches are related to the MCU. The pins in the MCU are related through a pull down resistor. This resistor pulls down the pin of the MCU to floor to ensure that a LOW voltage analyzing is examine through the MCU when the restriction switch is left open. The resistor configuration is proven within the diagram underneath.
two 12V DC relays are used to interchange AC electricity to the contactors of the motor which manipulate its path (either Up or Down). The circuit designed using Multisim is shown within the diagram underneath:
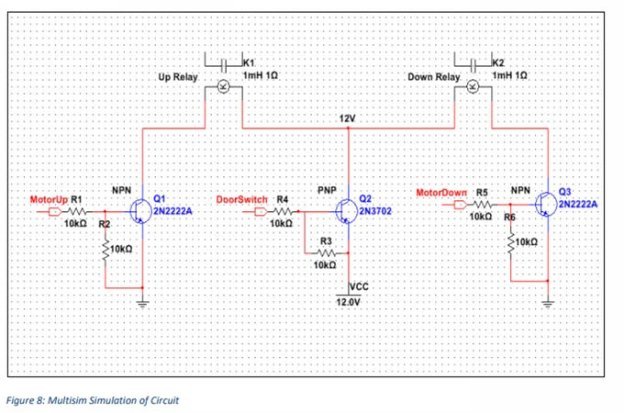
One cease of the coil contactor of each the relays are related to the 12V DC supply through a PNP transistor. the primary reason of doing that is to ensure that the Motor isn't always supplied energy until the raise door is closed. as soon as the lift door is closed, the DoorSwitch output pin to the gate of the PNP transistor is pulled to floor ensuring that the PNP is became directly to offer the VCC strength to both the relays. consequently the relay isn't became on even though the MotorUp or MotorDown signal is excessive. the alternative end of the relay coil is pulled to ground via a NPN transistor. The MotorUp signal is generated from the MCU. whilst the MotorUp sign is excessive, the primary NPN transistor is activated and it pulls the other coil contact to floor to complete the circuit to energy the coil of the Up Relay to electricity the motor. The identical method is used to set off the Down Relay. motives for the usage of transistors to replace the Relays are:
Font size:
Interval:
Bookmark:
Similar books «Best Arduino Automation Project: Arduino Project Ideas for Automated System»
Look at similar books to Best Arduino Automation Project: Arduino Project Ideas for Automated System. We have selected literature similar in name and meaning in the hope of providing readers with more options to find new, interesting, not yet read works.
Discussion, reviews of the book Best Arduino Automation Project: Arduino Project Ideas for Automated System and just readers' own opinions. Leave your comments, write what you think about the work, its meaning or the main characters. Specify what exactly you liked and what you didn't like, and why you think so.