Carlo Novara - Data-Driven Modeling, Filtering and Control
Here you can read online Carlo Novara - Data-Driven Modeling, Filtering and Control full text of the book (entire story) in english for free. Download pdf and epub, get meaning, cover and reviews about this ebook. year: 2020, publisher: Institution of Engineering & Technology, genre: Politics. Description of the work, (preface) as well as reviews are available. Best literature library LitArk.com created for fans of good reading and offers a wide selection of genres:
Romance novel
Science fiction
Adventure
Detective
Science
History
Home and family
Prose
Art
Politics
Computer
Non-fiction
Religion
Business
Children
Humor
Choose a favorite category and find really read worthwhile books. Enjoy immersion in the world of imagination, feel the emotions of the characters or learn something new for yourself, make an fascinating discovery.

- Book:Data-Driven Modeling, Filtering and Control
- Author:
- Publisher:Institution of Engineering & Technology
- Genre:
- Year:2020
- Rating:5 / 5
- Favourites:Add to favourites
- Your mark:
Data-Driven Modeling, Filtering and Control: summary, description and annotation
We offer to read an annotation, description, summary or preface (depends on what the author of the book "Data-Driven Modeling, Filtering and Control" wrote himself). If you haven't found the necessary information about the book — write in the comments, we will try to find it.
Carlo Novara: author's other books
Who wrote Data-Driven Modeling, Filtering and Control? Find out the surname, the name of the author of the book and a list of all author's works by series.




Data-Driven Modeling, Filtering and Control — read online for free the complete book (whole text) full work
Below is the text of the book, divided by pages. System saving the place of the last page read, allows you to conveniently read the book "Data-Driven Modeling, Filtering and Control" online for free, without having to search again every time where you left off. Put a bookmark, and you can go to the page where you finished reading at any time.
Font size:
Interval:
Bookmark:
Introduction
Simone Formentin
1Dipartimento di Elettronica, Informazione e Bioingegneria, Politecnico di Milano, Milan, Italy
2Dipartimento di Elettronica e Telecomunicazioni, Politecnico di Torino, Torino, Italy
In theory, there is no difference between theory and practice. In practice, there is.
Yogi Berra
One of the main challenges of modern engineering applications is how to effectively handle the increasingly large amount of data and information available in todays complex dynamical systems []. Data can not only be used for mathematical modeling but also for monitoring, filtering and control.
For instance, it is often estimated that more than 75% of the costs associated to an advanced control project goes into accurate mathematical modeling []. For some real plants, some work might be dedicated to devise a model of the physics underlying the process, but nowadays most of the efforts are usually devoted to data-driven modeling, that is, experiment design and implementation, model learning from data and data-driven validation.
Within this framework, system identification, namely, the science of deriving dynamical models from input/output measurements has played a key role throughout the last 50 years. The traditional objective of system identification has been that of finding the model which best fits the data, so that model-based filters and controllers could be designed standing on the assumption that the identified mathematical description coincides with the real system (the so-called certainty equivalence principle).
Application-oriented system identification. Sincequoting G. Boxall models are wrong, some are useful [].
In any case, the model (and the related uncertainty region) which best fits the data might be a bad choice for model-based design, in which the loss function accounted for during the identification phase (typically, a norm of the data-fitting error) does not usually coincide with the final application-oriented cost to minimize (e.g., in control it is a measure of the mismatch between the desired closed-loop behavior and the achieved one). Nonetheless, robust design is safe but may lead in some cases to very conservative performance, depending on the size of the uncertainty set. Also, deriving the required uncertainty region model may be a difficult task, especially in the case of nonlinear system. Some additional knowledge about the specific domain or the model application is then necessary to deal with real-world systems in an effective way.
Identification for control (I4C). Based on the above observations, in the 1990s, a few leading experts in system identification started to analyze the interplay between identification and control, see, e.g., the plenary [] at the 1991 IFAC Symposium on System Identification. The new field originated from such studies, called I4C, proposes a change of perspective, in which modeling is seen as a design problem. In other words, one could think of designing the identification process in order to find a model (and an uncertainty set) which does not necessarily fit the data at best but which obtains satisfactory closed-loop performance when the (robust) model-based controller is applied to the real system, byat the same timeminimizing the level of conservativeness.
An alternative yet appealing approach is to map the data directly onto the controller parameters. From now on, this approach will be referred to as direct data-driven control (D3C) []. D3C can be seen as a subfield of I4C, in which the identification process is designed so that the system to identify from data is directly the controller. An interesting feature of this approach is that the control design stage is automatically incorporated into the modeling part, thus simplifying the procedure.
The overall I4C rationale is depicted in (solid lines). Unlike standard identification and control, the modeling step is control-oriented, in which data are mapped onto the model which is best suited for the control design. In the same figure, the D3C alternative is illustrated using dashed lines.
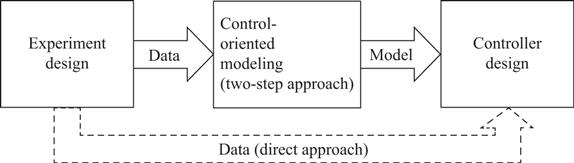
Figure 1.1 The I4C design procedure based on experimental data (solid lines). First, data are mapped onto a model of the system, by taking the control objective into account. Then, the controller is designed based on the identified model and, possibly, an estimate of the uncertainty set. If a D3C approach is adapted, the data are directly mapped onto the control parameters (dashed lines)
Identification for filtering (I4F). Similar to what happens in I4C, also in the context of I4F, two main approaches can be distinguished: the two-step approach, where first a model of the system of interest is identified from data and then a filter/observer is designed from the identified model; the direct approach, where the filter/observer is directly designed from the available data. As discussed in [].
The direct approach can overcome these issues, allowing the design of optimal filters for linear and nonlinear systems []. Another advantage of the direct approach is that it is in general simpler.
In summary, in I4F, we can say that the direct approach may be more convenient than the two-step approach in many situations. A similar statement does not hold in I4C, where the direct approach may present some advantages with respect to the two-step approach, but, in some situations, the latter may be more convenient (see the discussion in Section 1.2).
The overall I4F rationale is depicted in .
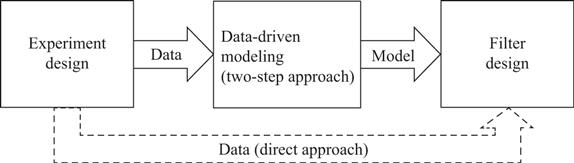
Figure 1.2 The I4F design procedure based on experimental data (solid lines). First, data are mapped onto a model of the system, by taking the control objective into account. Then, the filter/observer is designed based on the identified model and, possibly, an estimate of the uncertainty set. If a direct approach is adapted, the data are directly mapped onto the filter/observer (dashed lines)
System identification is the science of learning dynamical models from experimental data. A thorough review of the state-of-the-art for this discipline would take too much space and would anyway sound sketchy and incomplete. Therefore, after a brief introduction on the topic, we will hereafter focus on the interplay between system identification and model-based design applications, to introduce the key technical difficulties which still limit the performance of many real-world filters and controllers.
The first steps. To start with, consider that system identification goes as far back as the work of Gauss and Legendre in the late eighteenth and early nineteenth century. Until the late 1950s, the field had been mainly developed by mathematicians, statisticians, time-series analysts and econometricians. The main reason why control engineers had not been attracted by the discipline was that control design was mostly based on Bode and Nyquist plots, ZieglerNichols charts and other graphical design methods.
In the 1960s, thanks to the work by Kalman [], graphical design techniques were rapidly replaced by more effective model-based (certainty equivalence) control design. Parametric models became the central focus of attention, and the development of parametric identification techniques naturally followed that of model based control design.
The founding year of modern system identification is definitely the year 1965, with two different milestones. The HoKalman paper [].
Font size:
Interval:
Bookmark:
Similar books «Data-Driven Modeling, Filtering and Control»
Look at similar books to Data-Driven Modeling, Filtering and Control. We have selected literature similar in name and meaning in the hope of providing readers with more options to find new, interesting, not yet read works.
Discussion, reviews of the book Data-Driven Modeling, Filtering and Control and just readers' own opinions. Leave your comments, write what you think about the work, its meaning or the main characters. Specify what exactly you liked and what you didn't like, and why you think so.