Anurag Bhardwaj - Deep Learning Essentials
Here you can read online Anurag Bhardwaj - Deep Learning Essentials full text of the book (entire story) in english for free. Download pdf and epub, get meaning, cover and reviews about this ebook. year: 2018, publisher: Packt Publishing, genre: Children. Description of the work, (preface) as well as reviews are available. Best literature library LitArk.com created for fans of good reading and offers a wide selection of genres:
Romance novel
Science fiction
Adventure
Detective
Science
History
Home and family
Prose
Art
Politics
Computer
Non-fiction
Religion
Business
Children
Humor
Choose a favorite category and find really read worthwhile books. Enjoy immersion in the world of imagination, feel the emotions of the characters or learn something new for yourself, make an fascinating discovery.

- Book:Deep Learning Essentials
- Author:
- Publisher:Packt Publishing
- Genre:
- Year:2018
- Rating:4 / 5
- Favourites:Add to favourites
- Your mark:
Deep Learning Essentials: summary, description and annotation
We offer to read an annotation, description, summary or preface (depends on what the author of the book "Deep Learning Essentials" wrote himself). If you haven't found the necessary information about the book — write in the comments, we will try to find it.
Anurag Bhardwaj: author's other books
Who wrote Deep Learning Essentials? Find out the surname, the name of the author of the book and a list of all author's works by series.

Deep Learning Essentials — read online for free the complete book (whole text) full work
Below is the text of the book, divided by pages. System saving the place of the last page read, allows you to conveniently read the book "Deep Learning Essentials" online for free, without having to search again every time where you left off. Put a bookmark, and you can go to the page where you finished reading at any time.
Font size:
Interval:
Bookmark:
Torch is a Lua based deep learning framework developed by Ronan Collobert, Clement Farabet, and Koray Kavukcuoglu. It was initially used by the CILVR Lab at New York University . The Torch is powered by C/C++ libraries under its hood and also uses Compute Unified Device Architecture (CUDA) for its GPU interactions. It aims to be the fastest deep learning framework while also providing a simple C-like interface for rapid application development.
A distributed representation is dense, whereas each of the learned concepts is represented by multiple neurons simultaneously, and each neuron represents more than one concept. In other words, input data is represented on multiple, interdependent layers, each describing data at different levels of scale or abstraction. Therefore, the representation is distributed across various layers and multiple neurons. In this way, two types of information are captured by the network topology. On the one hand, for each neuron, it must represent something, so this becomes a local representation. On the other hand, so-called distribution means a map of the graph is built through the topology, and there exists a many-to-many relationship between these local representations. Such connections capture the interaction and mutual relationship when using local concepts and neurons to represent the whole. Such representation has the potential to capture exponentially more variations than local ones with the same number of free parameters. In other words, they can generalize non-locally to unseen regions. They hence offer the potential for better generalization because learning theory shows that the number of examples needed (to achieve the desired degree of generalization performance) to tune O (B) effective degrees of freedom is O (B). This is referred to as the power of distributed representation as compared to local representation (http://www.iro.umontreal.ca/~pift6266/H10/notes/mlintro.html).
An easy way to understand the example is as follows. Suppose we need to represent three words, one can use the traditional one-hot encoding (length N), which is commonly used in NLP. Then at most, we can represent N words. The localist models are very inefficient whenever the data has componential structure:
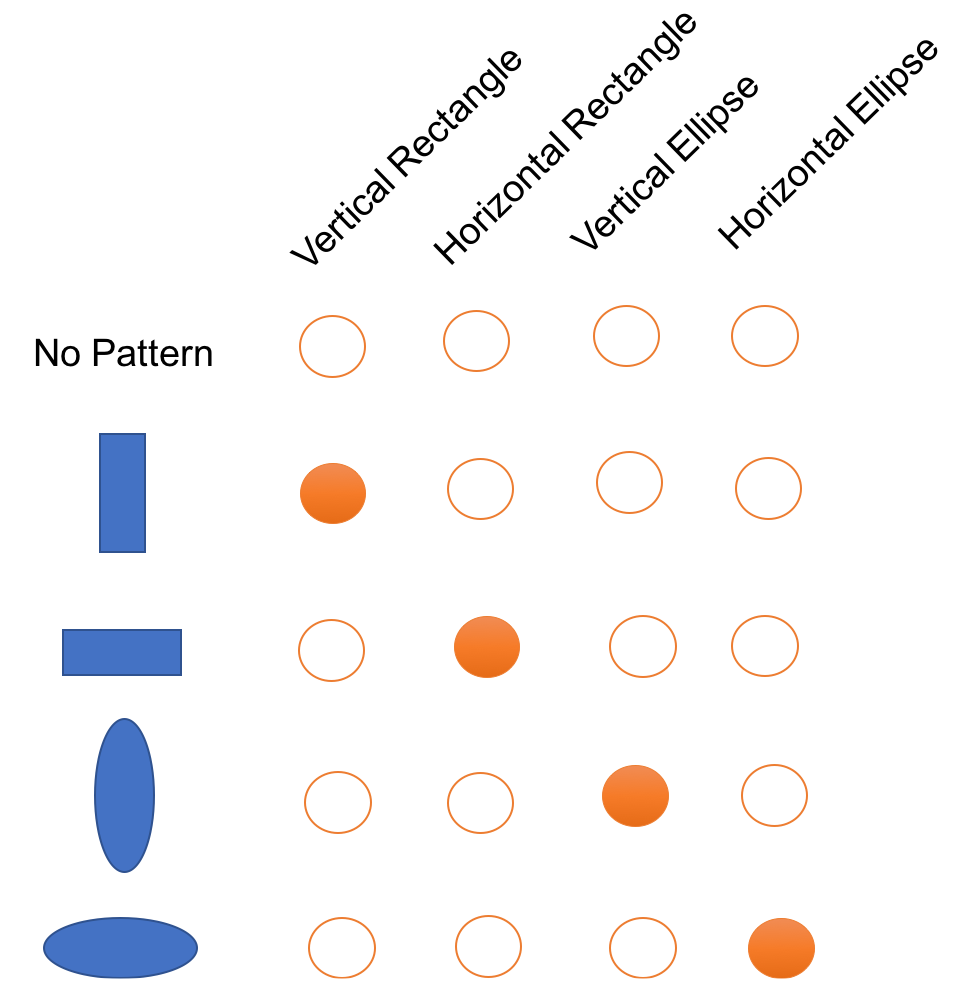
A distributed representation of a set of shapes would look like this:
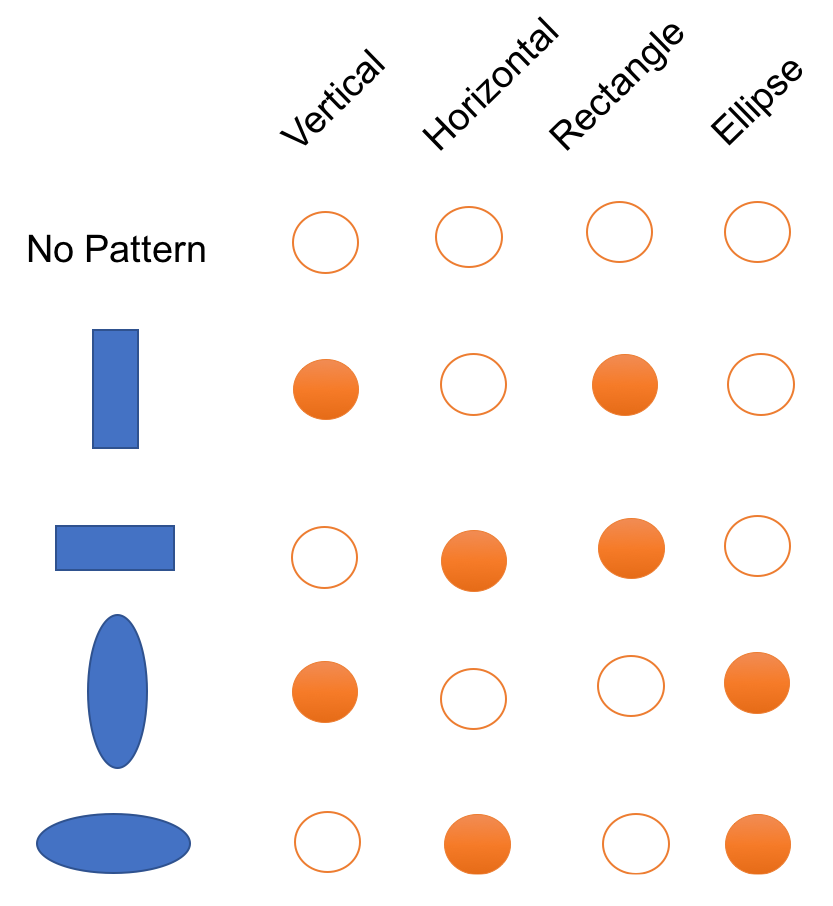
If we wanted to represent a new shape with a sparse representation, such as one-hot-encoding, we would have to increase the dimensionality. But whats nice about a distributed representation is we may be able to represent a new shape with the existing dimensionality. An example using the previous example is as follows:
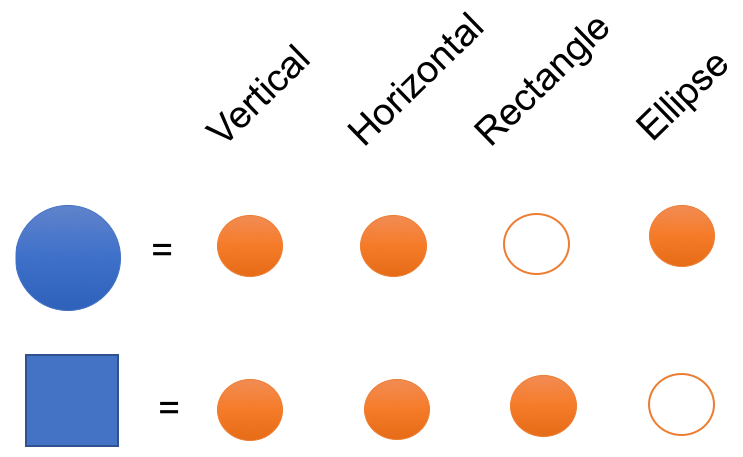
Therefore, non-mutually exclusive features/attributes create a combinatorially large set of distinguishable configurations and the number of distinguishable regions grows almost exponentially with the number of parameters.
One more concept we need to clarify is the difference between distributed and distributional. Distributed is represented as continuous activation levels in a number of elements, for example, a dense word embedding, as opposed to one-hot encoding vectors.
On the other hand, distributional is represented by contexts of use. For example, Word2Vec is distributional, but so are count-based word vectors, as we use the contexts of the word to model the meaning.
One of the final layers in a CNN is often the fully connected layer, which is also known as a dense layer. Neurons in this layer are fully connected to all the activations in a previous layer. The output of this layer is usually the class score, where the number of neurons in this layer equals the number of classes typically.
Using the combination of the layers previously described, a CNN converts an input image to the final class scores. Each layer works in a different way and has different parameter requirements. The parameters in these layers are learned through a gradient descent-based algorithm in a back propagation way.
One of the important aspects of a CNN is that once it's trained, it learns a set of feature maps or filters, which act as feature extractors on natural scene images. As such, it would be great to visualize these filters and get an understanding of what the network has learned through its training. Fortunately, this is a growing area of interest with lots of tools and techniques that make it easier to visualize the trained filters by the CNN. There are two primary parts of the network that are interesting to visualize:
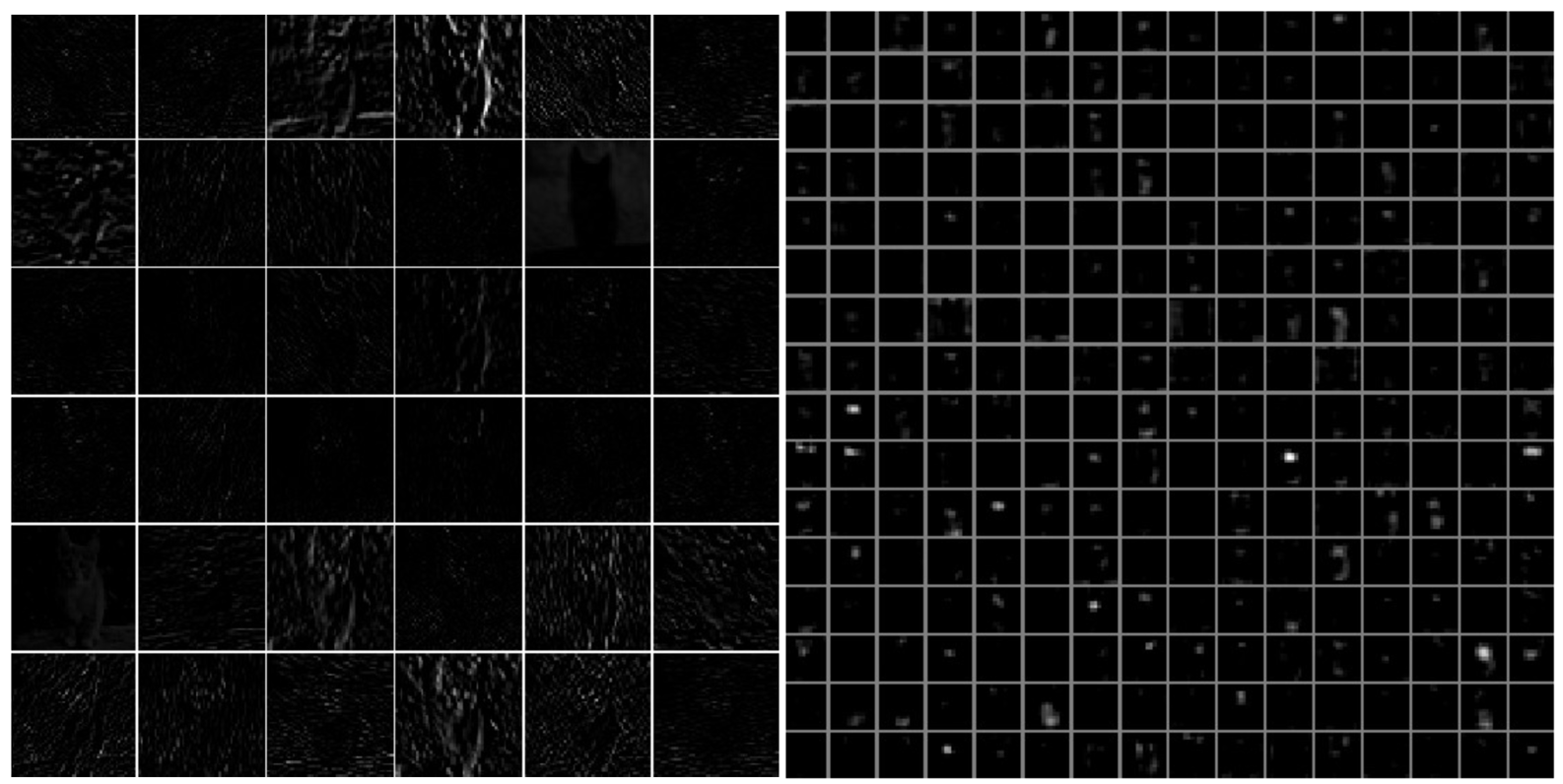
- Layer activation: This is the most common form of network visualization where one visualizes the activation of neurons during the forward pass of the network. This visualization is important for multiple reasons:
- It allows you to see how each learned filter responds to each input image. You can use this information to get a qualitative understanding of what the filter has learned to respond to.
- You can easily debug the network by seeing if most of the filters are learning any useful feature, or are simply blank images suggesting issues during network training. The following Visualizing activations of layers figure shows this step in more detail:
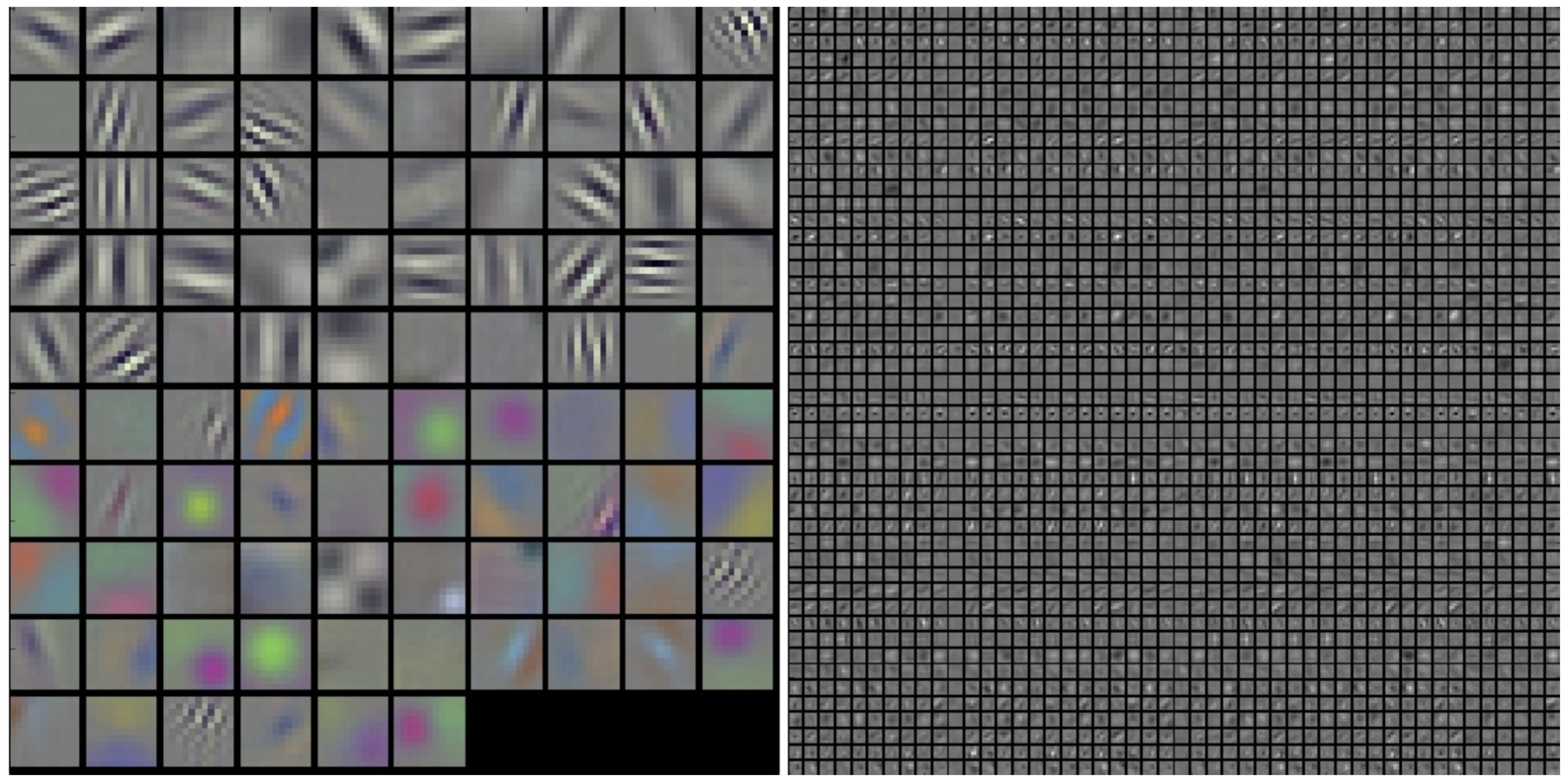
- Filter visualization: Another common use case for visualization is to visualize the actual filter values themselves. Remember that CNN filters can also be understood as feature detectors, which when visualized can demonstrate what kind of image feature each filter can extract. For example, the preceding Visualizing activations of layers figure illustrates that CNN filters can be trained to detect and extract edges in different orientations as well as different color combinations. Noisy filter values can also be easily detected during this technique to provide a feedback on poor training quality for the network:
In most cases, we should always consider ReLU first. But keep in mind that ReLU should only be applied to hidden layers. If your model suffers from dead neurons, then think about adjusting your learning rate, or try Leaky ReLU or maxout.
Font size:
Interval:
Bookmark:
Similar books «Deep Learning Essentials»
Look at similar books to Deep Learning Essentials. We have selected literature similar in name and meaning in the hope of providing readers with more options to find new, interesting, not yet read works.
Discussion, reviews of the book Deep Learning Essentials and just readers' own opinions. Leave your comments, write what you think about the work, its meaning or the main characters. Specify what exactly you liked and what you didn't like, and why you think so.