Hiqmet Kamberaj - Classical Mechanics
Here you can read online Hiqmet Kamberaj - Classical Mechanics full text of the book (entire story) in english for free. Download pdf and epub, get meaning, cover and reviews about this ebook. year: 2021, publisher: de Gruyter, genre: Home and family. Description of the work, (preface) as well as reviews are available. Best literature library LitArk.com created for fans of good reading and offers a wide selection of genres:
Romance novel
Science fiction
Adventure
Detective
Science
History
Home and family
Prose
Art
Politics
Computer
Non-fiction
Religion
Business
Children
Humor
Choose a favorite category and find really read worthwhile books. Enjoy immersion in the world of imagination, feel the emotions of the characters or learn something new for yourself, make an fascinating discovery.

- Book:Classical Mechanics
- Author:
- Publisher:de Gruyter
- Genre:
- Year:2021
- Rating:4 / 5
- Favourites:Add to favourites
- Your mark:
Classical Mechanics: summary, description and annotation
We offer to read an annotation, description, summary or preface (depends on what the author of the book "Classical Mechanics" wrote himself). If you haven't found the necessary information about the book — write in the comments, we will try to find it.
Hiqmet Kamberaj: author's other books
Who wrote Classical Mechanics? Find out the surname, the name of the author of the book and a list of all author's works by series.






Classical Mechanics — read online for free the complete book (whole text) full work
Below is the text of the book, divided by pages. System saving the place of the last page read, allows you to conveniently read the book "Classical Mechanics" online for free, without having to search again every time where you left off. Put a bookmark, and you can go to the page where you finished reading at any time.
Font size:
Interval:
Bookmark:
De Gruyter Textbook
ISBN 9783110755817
e-ISBN (PDF) 9783110755824
e-ISBN (EPUB) 9783110755930
Bibliographic information published by the Deutsche Nationalbibliothek
The Deutsche Nationalbibliothek lists this publication in the Deutsche Nationalbibliografie; detailed bibliographic data are available on the Internet at http://dnb.dnb.de.
2021 Walter de Gruyter GmbH, Berlin/Boston
Mathematics Subject Classification 2010: 00A79, 51P05, 00A69, 70F15, 76A02,
Often in physics, as we will see, we deal with the location in space, which is done with the use of coordinates. The ones most often used are the Cartesian coordinates, (x,y) . These are used in a Cartesian coordinate system, where the horizontal and vertical axes intersect at a single point, called the origin (see also ). Cartesian coordinates are also called rectangular coordinates.
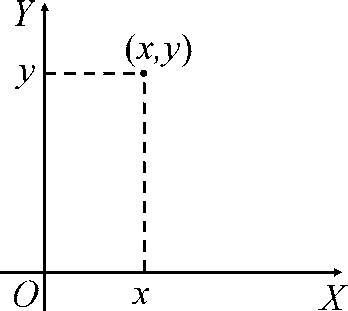
Figure 1.1 Points in a Cartesian coordinate system labeled with coordinates (x,y) .
For convenience reasons sometimes we represent a point in a plane by its plane polar coordinates (r,) , shown in . In the polar coordinate system, r is the distance from the origin to the point having Cartesian coordinates (x,y) , and is the angle between r- and x-axis, taken as the positive x-axis. The angle is usually measured counterclockwise from the positive x-axis.
From the right triangle in , we can obtain the Cartesian coordinates as a function of the plane polar coordinates of any point using the following equations:
Using the trigonometric relations, tan=sin/cos and sin2+cos2=1 , we can find that
Equation () can be used to relate the Cartesian coordinated (x,y) with the polar coordinates (r,) only when is defined as in , with positive angle measured counterclockwise from the positive x-axis.
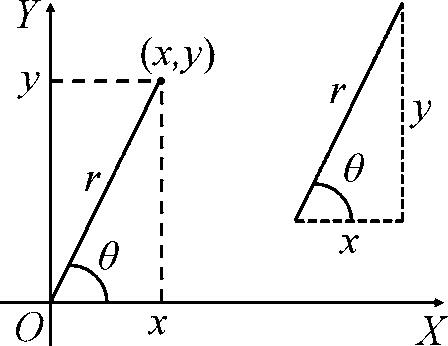
Figure 1.2 (a) The plane polar coordinates of a point are represented by the distance r and the angle , where is measured counterclockwise from the positive x-axis. (b) The right triangle used to relate (x,y) to (r,) .
These standard conventions are often used from some scientific calculators to perform conversions between Cartesian and polar coordinates. Moreover, if we choose the reference axis for the polar angle to be different from the positive x-axis or if the sense of increasing is different, then the expressions in eq.() will change.
In physics, there exist both scalar quantities and vector quantities. For example, for expressing the temperature, we need its value (that is a number) and the units, either in degrees Celsius ( C ) or degrees Fahrenheit ( F ). Therefore, we say that temperature is a scalar quantity, entirely defined by a number and appropriate units. Other scalar quantities include volume, mass, and time intervals.
By definition, a scalar quantity is specified by a single value with an appropriate unit. A scalar quantity has no direction.
The scalar quantities obey the same rules of ordinary arithmetic when used for calculations.
Often, when we determine an objects position (say a car) that starts the motion from some reference frames origin, it is necessary to know both its speed and its direction. Both the speed and the direction are named as a single quantity, velocity. Therefore, velocity is a vector quantity because it depends on the direction. As we will see, it is defined as a physical quantity that is completely specified by a value (speed) with appropriate units and direction.
By definition, a vector quantity is determined by both magnitude and direction.
The displacement is another example of the vector quantity. Suppose a particle moves from point A to point B along a straight path, as shown in , its displacement is still the arrow drawn from A to B.
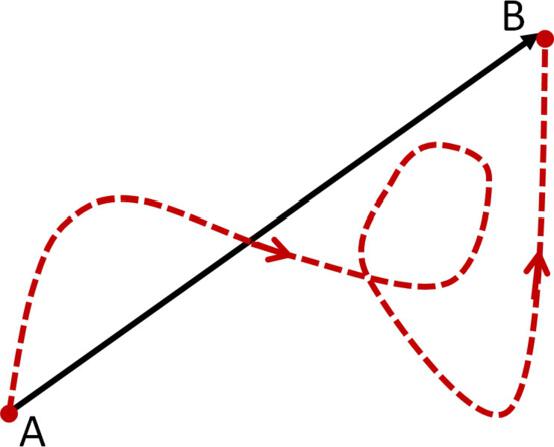
Figure 1.3 The trajectory of a particle moving from some point A to some point B.
Here, we will use a boldface letter (A) to represent a vector quantity. Besides, the vector can be notated with an arrow over a letter. The magnitude of the vector A will be written either A or |A| . The magnitude of a vector also has physical units; for example, the displacement has SI units of meters and the velocity meters per second.
Two vectors A and B may be defined to be equal if they have the same magnitude and the same direction. That is, A=B only if A=B and if A and B point in the same direction along parallel lines.
In we show several equal vectors parallel to each other even though they all have different starting points. Using this property in a diagram, we can move a vector to a position parallel to itself without affecting the vector. That is often used to draw the free diagram of forces.
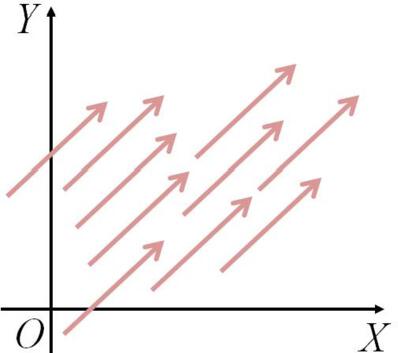
Figure 1.4 Illustration of equal vectors.
To add vector B to vector A, we will use the geometric description. That is, first, draw vector A, with its magnitude represented by a convenient scale, on graph paper and then draw vector B to the same scale with its tail starting from the tip of A, as shown in .
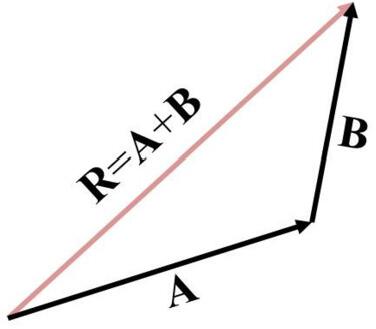
Figure 1.5 The sum of two vectors A and B is the vector R=A+B .
The final resultant vector R is written as
R is the vector drawn from the tail of A to the tip of B. This procedure is known as the triangle rule of addition.
We can use the same geometrical description to add more than two vectors, as shown in , for the case of four different vectors. The resultant vector R is the vector drawn from the tail of the first vector to the tip of the last vector completing in this way a polygon:
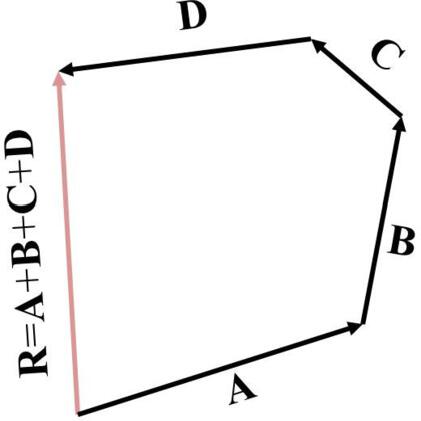
Figure 1.6 The sum of four vectors, namely A, B, C and D, is the vector R=A+B+C+D .
Font size:
Interval:
Bookmark:
Similar books «Classical Mechanics»
Look at similar books to Classical Mechanics. We have selected literature similar in name and meaning in the hope of providing readers with more options to find new, interesting, not yet read works.
Discussion, reviews of the book Classical Mechanics and just readers' own opinions. Leave your comments, write what you think about the work, its meaning or the main characters. Specify what exactly you liked and what you didn't like, and why you think so.