Guillermo Alberto Pérez Guillén - Projects with PIC18F2550 and C18 Compiler
Here you can read online Guillermo Alberto Pérez Guillén - Projects with PIC18F2550 and C18 Compiler full text of the book (entire story) in english for free. Download pdf and epub, get meaning, cover and reviews about this ebook. year: 0, genre: Home and family. Description of the work, (preface) as well as reviews are available. Best literature library LitArk.com created for fans of good reading and offers a wide selection of genres:
Romance novel
Science fiction
Adventure
Detective
Science
History
Home and family
Prose
Art
Politics
Computer
Non-fiction
Religion
Business
Children
Humor
Choose a favorite category and find really read worthwhile books. Enjoy immersion in the world of imagination, feel the emotions of the characters or learn something new for yourself, make an fascinating discovery.
- Book:Projects with PIC18F2550 and C18 Compiler
- Author:
- Genre:
- Year:0
- Rating:3 / 5
- Favourites:Add to favourites
- Your mark:
Projects with PIC18F2550 and C18 Compiler: summary, description and annotation
We offer to read an annotation, description, summary or preface (depends on what the author of the book "Projects with PIC18F2550 and C18 Compiler" wrote himself). If you haven't found the necessary information about the book — write in the comments, we will try to find it.
Guillermo Alberto Pérez Guillén: author's other books
Who wrote Projects with PIC18F2550 and C18 Compiler? Find out the surname, the name of the author of the book and a list of all author's works by series.


Projects with PIC18F2550 and C18 Compiler — read online for free the complete book (whole text) full work
Below is the text of the book, divided by pages. System saving the place of the last page read, allows you to conveniently read the book "Projects with PIC18F2550 and C18 Compiler" online for free, without having to search again every time where you left off. Put a bookmark, and you can go to the page where you finished reading at any time.
Font size:
Interval:
Bookmark:
Guillermo Alberto Prez Guilln Projects With PIC18F2550 And C18 Compiler IndEX  This work is authors property, and has been registered on the Website http://www.safecreative.com with the registration code 1609269275953 and protected under the License Creative Commons Attribution-NonCommercial-NoDerivatives 4.0
This work is authors property, and has been registered on the Website http://www.safecreative.com with the registration code 1609269275953 and protected under the License Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 
- US1881
- LM35DZ
- MQ-2
- MQ-7
- PIR
- FAN
- MOTOR CD
- PUMP
- LED
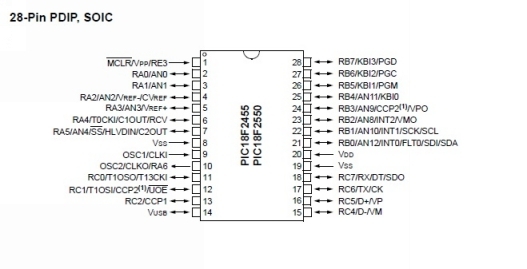 Features Full Speed USB 2.0 (12Mbit/s) interface
Features Full Speed USB 2.0 (12Mbit/s) interface - 1K byte Dual Port RAM + 1K byte GP RAM
- Full Speed Transceiver
- 16 Endpoints (IN/OUT)
- Internal Pull Up resistors (D+/D-)
- 48 MHz performance (12 MIPS)
- Pin-to-pin compatible with PIC16C7X5
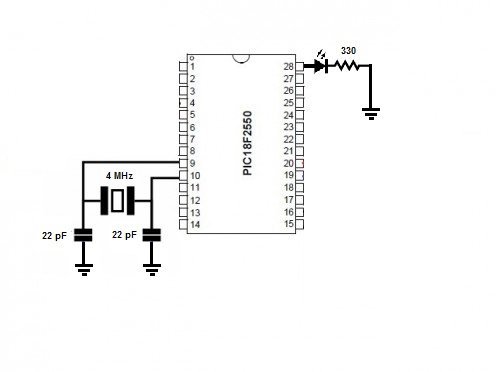 Components:
Components: - Microcontroller PIC18F2550
- Crystal 4 MHz
- Capacitor 22 pF
 Links: Video: https://youtu.be/g8d5MTMCVq8 Source code: https://drive.google.com/file/d/0B8XMvcdJvBBYdEJ4d2dSVnAyY00/view?usp=sharing Links: Video: https://youtu.be/g8d5MTMCVq8 Source code: https://drive.google.com/file/d/0B8XMvcdJvBBYdEJ4d2dSVnAyY00/view?usp=sharing
Links: Video: https://youtu.be/g8d5MTMCVq8 Source code: https://drive.google.com/file/d/0B8XMvcdJvBBYdEJ4d2dSVnAyY00/view?usp=sharing Links: Video: https://youtu.be/g8d5MTMCVq8 Source code: https://drive.google.com/file/d/0B8XMvcdJvBBYdEJ4d2dSVnAyY00/view?usp=sharing Included Visual Basic 6 and Microchip C18 code. The PIC microcontroller has 10 bit analogue to digital converter, by selecting 8 bits conversion the 2 LSB are ignored. The circuit is powered by the USB. The interface to the PC is HID class. The frequency counter has a range of up to 4MHz (24bits). Inputs samplings can be done at rates of 1 per second and 1 every 0.1 second.
HID class is a class of devices like the mouse and the keyboard; the data transfer rate is limited to 64KB/S. Circuit Diagram 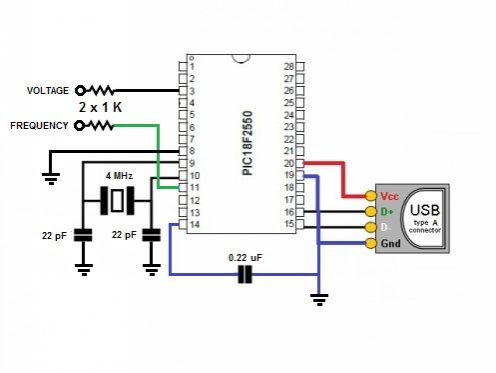 Components:
Components:
- Microcontroller PIC18F2550
- USB Type A
- Crystal 4 MHz
- Capacitor 22 pF, o.22 uF
Whenever the firmware isn't busy servicing // the USB, we will get control here to do other processing. void ProcessIO(void) { byte rxCnt; // User Application USB tasks if ((deviceState < CONFIGURED) || (UCONbits.SUSPND==1)) return; // Find out if an Output report has been received from the host. rxCnt = HIDRxReport(rxBuffer, HID_OUTPUT_REPORT_BYTES); // If no bytes in, then nothing to do if (rxCnt == 0) return; ADCON0bits.GO_DONE = 1; //start ADC //Frequency Counter TMR1L = TMR1H = freq3 = 0; //clear timers PIR1bits.TMR1IF = 0; PIR1bits.TMR2IF = 0; PORTBbits.RB5 = rxBuffer[1]; //1 sec time base LED if(rxBuffer[1]){timebase = 200;} //time base=1 sec else{timebase = 20;} T1CONbits.TMR1ON = 1; //start count T2CONbits.TMR2ON = 1; while(timebase){ while(!PIR1bits.TMR2IF){ if(PIR1bits.TMR1IF){++freq3; PIR1bits.TMR1IF = 0;} } PIR1bits.TMR2IF = 0; --timebase; } T1CONbits.TMR1ON = 0; //stop count T2CONbits.TMR2ON = 0; //Data to send to host txBuffer[0]=ADRESH; txBuffer[1]=ADRESL; txBuffer[2]=timebase; txBuffer[3]=TMR1L; txBuffer[4]=TMR1H; txBuffer[5]=freq3; // As long as the SIE is owned by the processor, we let USB tasks continue. while (ep1Bi.Stat & UOWN) ProcessUSBTransactions(); // The report will be sent in the next interrupt IN transfer. HIDTxReport(txBuffer, HID_INPUT_REPORT_BYTES); } //********************************************************************* // Initialization for a SET_FEATURE request. inPtr = (byte*)&HIDFeatureBuffer; } } // Post processing for a SET_FEATURE request. inPtr = (byte*)&HIDFeatureBuffer; } } // Post processing for a SET_FEATURE request.
Font size:
Interval:
Bookmark:
Similar books «Projects with PIC18F2550 and C18 Compiler»
Look at similar books to Projects with PIC18F2550 and C18 Compiler. We have selected literature similar in name and meaning in the hope of providing readers with more options to find new, interesting, not yet read works.
Discussion, reviews of the book Projects with PIC18F2550 and C18 Compiler and just readers' own opinions. Leave your comments, write what you think about the work, its meaning or the main characters. Specify what exactly you liked and what you didn't like, and why you think so.