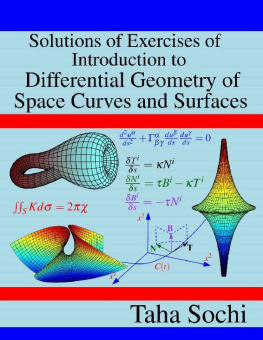
Chapter 1
Preliminaries
Exercise 1. Name three mathematicians accredited for thedevelopment of tensor calculus. For each one of these mathematicians,give a mathematical technical term that bears his name.
Answer:
Mathematicians: Ricci, Levi-Civita and Christoffel.
Terms: Ricci calculus, Levi-Civita symbol, Christoffel symbols.
Exercise 2. What are the main scientific disciplines that employ the language and techniques of tensor calculus?
Answer:
Differential geometry, general theory of relativity, continuum mechanics, and fluid dynamics among other disciplines.
Exercise 3. Mention one cause for the widespread use of tensor calculus in science.
Answer:
Its ability to deal with complex problems inmulti-dimensional spaces as it provides very efficient and powerfulmathematical tools for modeling and analyzing this type of problemswhile complying with the principle of invariance.
Exercise 4. Describe some of the distinctive features of tensorcalculus which contributed to its success and extensive use inmathematics, science and engineering.
Answer:
Elegance, compactness, clarity, power, eloquence, etc.
Exercise 5. Give preliminary definitions of the following terms: scalar, vector, tensor, rank of tensor, and dyad.
Answer:
Scalar: mathematical object (e.g. number,variable, function) that is completely identified by its magnitude andsign with no reference to a basis vector set.
Vector: mathematical object that is completelyidentified by its magnitude and a single direction in space; hence itrequires a basis vector set to be fully identified in component form.
Tensor: mathematical object that is completelyidentified by a set of components each of which is associated withmultiple directions in space and hence it requires a basis tensor set(e.g. EiEj for rank-2). Tensor is also used to describe some mathematical objectswith certain transformation properties and hence it includes scalarsand vectors.
Rank of tensor: a measure of the complexity ofthe structure of tensor; it is quantified by the number of free indicesof the tensor.
Dyad: tensor object associated with double direction; outer product of two vectors such as E1E3 .
Exercise 6. What is the meaning of the following mathematical symbols?
i
ii
A,i
Ai;k
Answer:
Partial derivative operator with respect to the ith coordinate.
Laplacian operator in Cartesian form.
nabla operator.
Partial derivative of scalar A with respect to the ith coordinate.
Laplacian operator.
Covariant derivative of vector Ai (which is a rank-1 covariant tensor) with respect to the kth coordinate.
Exercise 7. Is the following equality correct? If so, is there any condition for this to hold?
kl=lk
Answer: Yes, it is correct assuming the C2 continuity condition.
Exercise 8. Pick five terms from the Index about partialderivative operators and their symbols as used in tensor calculus andexplain each one of these terms giving some examples for their use.
Answer:
Comma: used as subscript to indicate partial differentiation with respect to the following index(es).
Examples:
f,i
A i,jk
Bij,k
Commutative: partial differential operators with respect to different variables are commutative assuming the C2 continuity condition.
Examples:
ijg=jig
klCq=lkCq
Curl: cross product of the nabla operator and a non-scalar tensor.
Examples:
A
B
Laplacian: operator representing consecutive application ofspatial partial differentiation as represented by the nabla operator.It may be described as the divergence of gradient. It is usuallysymbolized by or or ii .
Examples:
2f
B
jjAi
nabla: partial differential operator usually symbolized by .It is vector operator. It is spatial operator as it stands fordifferentiation with respect to coordinates of space. It is used as abasis for a number of operators and operations in vector and tensorcalculus such as gradient, divergence and curl.
Examples: f
A
Exercise 9. Describe, briefly, the following six coordinatesystems outlining their main features: orthonormal Cartesian,cylindrical, plane polar, spherical, general curvilinear, and generalorthogonal.
Answer:
Orthonormal Cartesian: rectilinear coordinatesystem with mutually orthogonal basis vectors each of unit length;usually represented in 3D space by ( x,y,z )where each one of these variables represents signed distance from theorigin of coordinates along the corresponding coordinate axis; thesimplest and most commonly used of all coordinate systems; should bechosen if it satisfies the requirements for solving the given problem.
Plane polar: it is the same as the cylindrical system (refer to the next) with the absence of the third coordinate (i.e. z coordinate); hence it is 2D system used in coordinating plane surfaces;particularly useful for solving problems with circular symmetry andproblems of rotational nature.
Cylindrical: curvilinear orthogonal coordinatesystem; it has unit basis vectors by definition; these vectors arecoordinate dependent in their direction except the basis vectorcorresponding to the third coordinate which is constant; specificallydefined for 3D spaces; particularly useful for solving problems withcylindrical symmetry; usually represented by ( ,,z ) where represents the perpendicular positive distance from the given point inspace to the third axis of the corresponding rectangular Cartesiansystem, represents the anglebetween the first axis and the line connecting the origin ofcoordinates to the perpendicular projection of the point on the x1x2 plane of the corresponding Cartesian system, and z is the same as the third coordinate of the point in the reference Cartesian system.
Spherical: curvilinear orthogonal coordinate system; it has unit basisvectors by definition; all these vectors are coordinate dependent intheir direction; specifically defined for 3D spaces; particularlyuseful for solving problems with spherical symmetry; usuallyrepresented by ( r,, ) where r represents the positive distance from the origin of coordinates to the given point in space, is the angle from the positive x3 axis of the corresponding Cartesian system to the line connecting the origin of coordinates to the point, and is as defined in the cylindrical system.