Manuel Jimnez , Rogelio Palomera and Isidoro Couvertier Introduction to Embedded Systems 2014 Using Microcontrollers and the MSP430 10.1007/978-1-4614-3143-5_1 Springer Science+Business Media New York 2014
1. Introduction
Abstract
An embedded system can be broadly defined as a device that contains tightly coupled hardware and software components to perform a single function, which forms part of a larger system, is not intended to be independently programmable by the user, and is expected to work with minimal or no human interaction. Two additional characteristics are very common in embedded systems: reactive operation and heavily constrained.
1.1 Embedded Systems: History and Overview
An embedded system can be broadly defined as a device that contains tightly coupled hardware and software components to perform a single function, forms part of a larger system, is not intended to be independently programmable by the user, and is expected to work with minimal or no human interaction. Two additional characteristics are very common in embedded systems: reactive operation and heavily constrained.
Most embedded system interact directly with processes or the environment, making decisions on the fly, based on their inputs. This makes necessary that the system must be reactive, responding in real-time to process inputs to ensure proper operation. Besides, these systems operate in constrained environments where memory, computing power, and power supply are limited. Moreover, production requirements, in most cases due to volume, place high cost constraints on designs.
This is a broad definition that highlights the large range of systems that fall into it. In the next sections we provide a historic perspective in the development of embedded systems to bring meaning to the definition above.
1.1.1 Early Forms of Embedded Systems
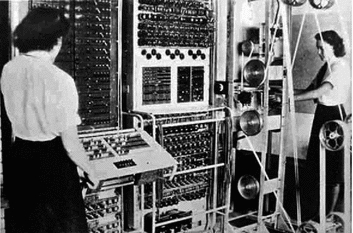
The concept of an embedded system is as old as the concept of a an electronic computer, and in a certain way, it can be said to precede the concept of a general purpose computer. If we look a the earliest forms of computing devices, they adhere better to the definition of an embedded system than to that of a general purpose computer. Take as an example early electronic computing devices such as the Colossus Mark I and II computers, partially seen in Fig.. These electro-mechanical behemoths, designed by the British to break encrypted teleprinter German messages during World War II, were in a certain way similar to what we define as an embedded system.
Fig. 1.1
Control panel and paper tape transport view of a Colossus Mark II computer (public image by the British Public Record Office, London)
Although not based on the concept of a stored-program computer, these machines were able to perform a single function, reprogrammability was very awkward, and once fed with the appropriate inputs, they required minimal human intervention to complete their job. Despite their conceptual similarity, these early marvels of computing can hardly be considered as integrative parts of larger system, being therefore a long shot to the forms known today as embedded systems.
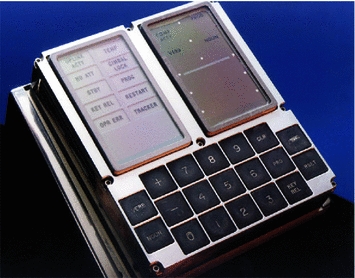
One of the earliest electronic computing devices credited with the term embedded system and closer to our present conception of such was the Apollo Guidance Computer (AGC). Developed at the MIT Instrumentation Laboratory by a group of designers led by Charles Stark Draper in the early 1960s, the AGC was part of the guidance and navigation system used by NASA in the Apollo program for various spaceships. In its early days it was considered one of the riskiest items in the Apollo program due to the usage of the then newly developed monolithic integrated circuits.
The AGC incorporated a user interface module based on keys, lamps, and seven-segment numeric displays (see Fig. ); a hardwired control unit based on 4,100 single three-input RTL NOR gates, 4 KB of magnetic core RAM, and 32 KB of core rope ROM. The unit CPU was run by a 2.048 MHz primary clock, had four 16-bit central registers and executed eleven instructions. It supported five vectored interrupt sources, including a 20-register timer-counter, a real-time clock module, and even allowed for a low-power standby mode that reduced in over 85 % the modules power consumption, while keeping alive all critical components.
Fig. 1.2
AGC user interface module (public photo EC96-43408-1 by NASA)
The system software of the Apollo Guidance Computer was written in AGC assembly language and supported a non-preemptive real-time operating system that could simultaneously run up to eight prioritized jobs. The AGC was indeed an advanced system for its time. As we enter into the study of contemporary applications, we will find that most of these features are found in many of todays embedded systems.
Despite the AGC being developed in a low scale integration technology and assembled in wire-wrap and epoxy, it proved to be a very reliable and dependable design. However, it was an expensive, bulky system that remained used only for highly specialized applications. For this reason, among others, the flourishing of embedded systems in commercial applications had to wait until another remarkable event in electronics: the advent of the microprocessor.
1.1.2 Birth and Evolution of Modern Embedded Systems
The beginning of the decade of 1970 witnessed the development of the first microprocessor designs. By the end of 1971, almost simultaneously and independently, design teams working for Texas Instruments, Intel, and the US Navy had developed implementations of the first microprocessors.
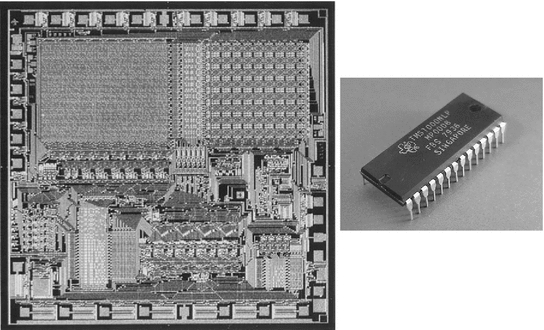
Gary Boone from Texas Instruments was awarded in 1973 the patent of the first single-chip microprocessor architecture for its 1971 design of the TMS1000 (Fig. ). This chip was a 4-bit CPU that incorporated in the same die 1K of ROM and 256 bits of RAM to offer a complete computer functionality in a single-chip, making it the first microcomputer-on-a-chip (a.k.a microcontroller). The TMS1000 was launched in September 1971 as a calculator chip with part number TMS1802NC.
Fig. 1.3
Die microphotograph ( left ) packaged part for the TMS1000 ( Courtesy of Texas Instruments, Inc. )
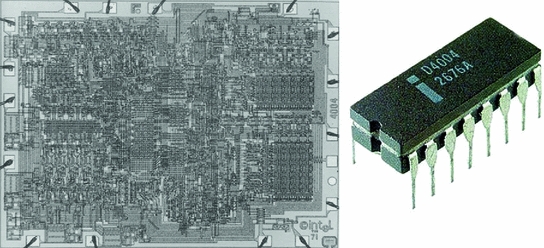
The i4004, (Fig. ) recognized as the first commercial, stand-alone single chip microprocessor, was launched by Intel in November 1971. The chip was developed by a design team led by Federico Faggin at Intel. This design was also a 4-bit CPU intended for use in electronic calculators. The 4004 was able to address 4K of memory, operating at a maximum clock frequency of 740 KHz. Integrating a minimum system around the 4004 required at least three additional chips: a 4001 ROM, a 4002 RAM, and a 4003 I/O interface.