A Swiss-knife computer for the Shuttle
As the human body cannot live and function without the pumping action of the heart, the data processing system (DPS) formed the active heart of the Space Shuttle, for without it the Orbiter simply could not fly. Events such as external tank separation, jet firings, main engine cutoff, communications, and miscellaneous other functions, were so complex and time-critical that only by using computers were they feasible. Even manual control of ascent and re-entry would have been impracticable without computers, since the manual inputs provided by the pilots needed to be elaborated by the computers to produce the desired effect. At a higher level, the DPS performed tasks essential to flying the vehicle (guidance, navigation and control, or GNC), monitoring on board systems (system management, or SM), and both transmitting telemetry to Mission Control and enabling Mission Control to command on board systems. Owing to this Swiss-knife character of the Shuttle computers, they were normally called general purpose computers or GPCs.
For reasons that will be explained in the following paragraphs, five GPCs formed the brain of the DPS. In an era in which we are used to knowing which are the most common computer brands and manufactures, the computers used on the Shuttle are hardly known to the general public. In order to lower research and development costs of the Shuttle program, NASA wanted an off-the-shelf computer system. If space rating a system involved stricter requirements than a military standard, starting with a military-rated computer would make the next step in certification a lot easier and cheaper. Therefore, in the early 1970s, only two computers for aircraft avionics under development were potentially suitable for the new spaceship: the IBM AP-101B (a derivative of the technology that was already in use by various military and NASA flight programs) and the Singer-Kearfott SKC-2000 (which at that time was under consideration for the B-1 stealth bomber program). But both would clearly require extensive modification for use in space. The IBM machine was selected because of the companys success with developing the computers for the Saturn V moonrocket and the Skylab space station, whose systems bore a slight similarity to the avionics configuration planned for the Shuttle. In modern terms, the processing power of the GPC was ridiculously inferior to even the least powerful desktop computer that one can buy, but compared to what was available for space applications back then, they were cutting-edge technology.
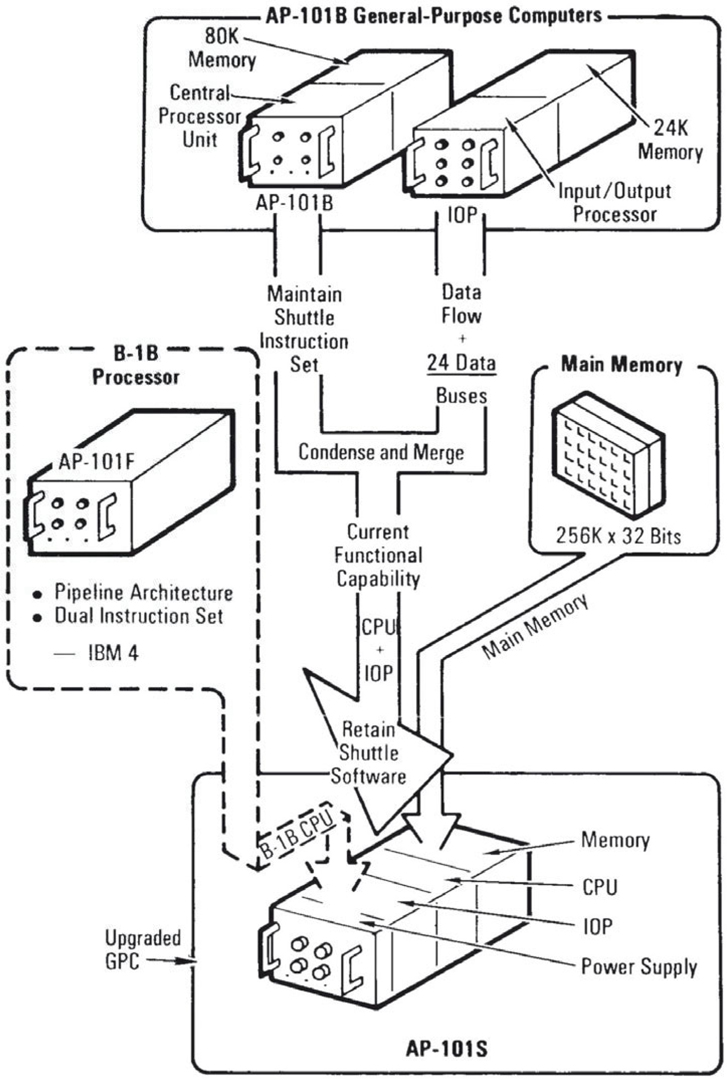
AP-101 General purpose computer schematics.
Each computer consisted of a central processing unit (CPU), an input/output processor (IOP), one megabyte of memory and various other components housed in an electromagnetic interference (EMI) hardened case. While the CPU performed the instructions to control on board systems and manipulate data, the IOP formatted and transmitted commands to the systems, received and validated response data from the systems, and maintained the status of the interfaces between the CPU and the other computers. In other words, while the CPU was the number cruncher the IOP did all the interfacing with the rest of the computers and vehicle systems. The computers were able to perform their functions by control logic embedded in a combination of software and microprogrammed hardware.
Within a few years of initiating the AP-101B design in January 1972, it became evident that an improved GPC would be required. Studies for upgrading the existing AP-101B started in January 1984, and they culminated in the mid-1990s with the introduction into service of the AP-101S. From a configuration point of view, the big difference was that the new computers incorporated the CPU and the IOP in a single avionics box, halving the weight and size, and also reducing the power requirements. From a performance point of view, this upgrade provided 2.5 times the memory capacity and up to three times the processor speed with minimum impact on flight software. For instance, while the old GPCs were capable of 400,000 operations per seconds, the new ones could perform up to 1,000,000 operations per second.
The Shuttle nerves
As in the human body, in which the brain communicates its commands and receives information by means of an extensive network of nerves, the Shuttle computers could communicate with all the on board systems and payloads via discrete signal lines and serial digital data buses. While the discrete signal lines transmitted signals indicating a binary condition such as the position of a given switch or circuit breaker, the data buses transmitted bulk information and data regarding the status of all the systems.
The choice to use data buses was taken early in the program, in a period in which the aviation industry was already starting to implement this configuration in the latest jets. Because sensors, control effectors and associated devices would be distributed all over the Orbiter, the weight of the individual wires required to carry all the signals and commands needed for operating all of its elements would have been prohibitive. In response, the use of multiplexed digital data buses was investigated and baselined. Generally speaking, a data bus physically consists of a pair of insulated wires twisted together and then electrically shielded, and it permits data transmission from a large number of sources on a time-sharing basis to a single or perhaps multiple receivers.
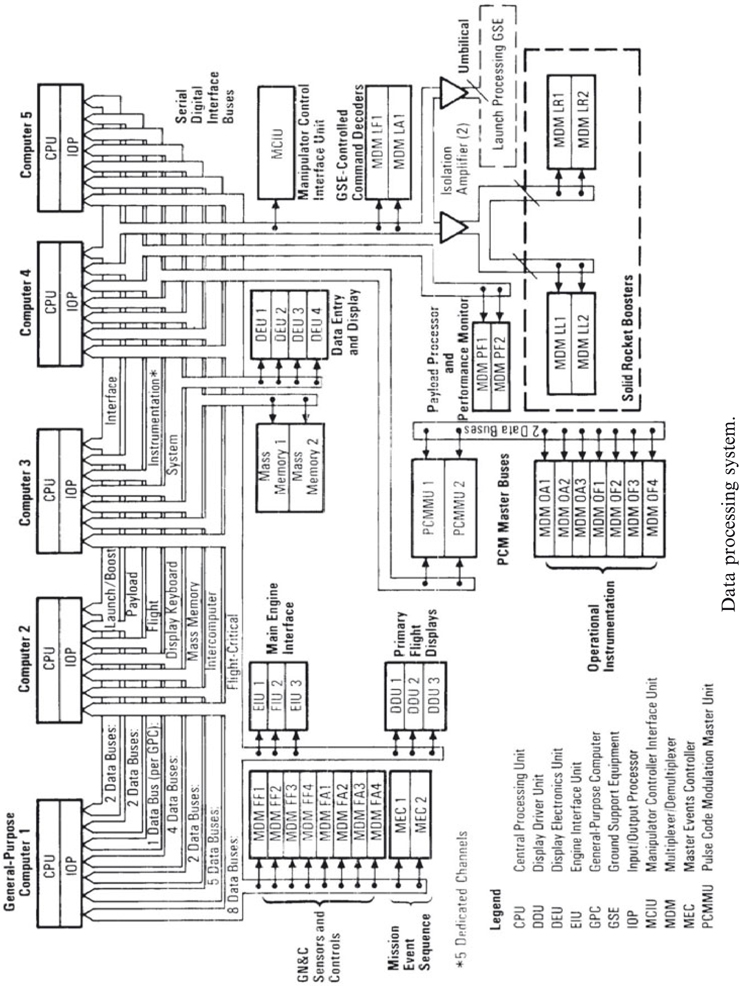
Data processing system.
The Orbiters data bus network comprised 28 data buses allocated by functional use, criticality, and traffic load, into seven different categories.
Eight data buses belonged to the category of flight-critical buses (FC) since they carried all the data and command traffic associated with guidance, navigation, flight control, mission sequence, and management of critical non-avionics functions. An important part of a space flight is enabling Mission Control to analyze the status of the vehicle and its payload. In the Orbiter, two pulse-code modulation master units (PCMMU) received data from the on board instrumentation and payload as well as from the five GPCs via individual instrumentation/PCMMU data buses. Once in the PCMMU, the data were formatted in operational downlink, which was sent to one of two network signal processor (NSP). In the NSP the operational downlink was combined with the on board recorded voice for transmission to the ground by either the S-band or Ku-band communications systems. The GPCs were linked to the displays and keyboards on the flight deck by four display/keyboard (DK) data buses. And two launch data buses that were used mainly for ground checkout and launch phase activities served as an interface for data gathered from the solid rocket boosters, and once in space they provided an interface with the controller for the remote manipulator system. These buses differed from the others in that they required isolation amplifiers to accommodate the long wire runs to the launch processing system and to isolate the buses when disconnected at liftoff and at solid booster separation. Two payload data buses (PL) provided an interface for payload support operations, system management functions, payload bay door control, and communications antenna switching.