Bernard Friedland - Control System Design: An Introduction to State-Space Methods
Here you can read online Bernard Friedland - Control System Design: An Introduction to State-Space Methods full text of the book (entire story) in english for free. Download pdf and epub, get meaning, cover and reviews about this ebook. year: 2005, publisher: Dover Publications, genre: Science. Description of the work, (preface) as well as reviews are available. Best literature library LitArk.com created for fans of good reading and offers a wide selection of genres:
Romance novel
Science fiction
Adventure
Detective
Science
History
Home and family
Prose
Art
Politics
Computer
Non-fiction
Religion
Business
Children
Humor
Choose a favorite category and find really read worthwhile books. Enjoy immersion in the world of imagination, feel the emotions of the characters or learn something new for yourself, make an fascinating discovery.
- Book:Control System Design: An Introduction to State-Space Methods
- Author:
- Publisher:Dover Publications
- Genre:
- Year:2005
- Rating:4 / 5
- Favourites:Add to favourites
- Your mark:
Control System Design: An Introduction to State-Space Methods: summary, description and annotation
We offer to read an annotation, description, summary or preface (depends on what the author of the book "Control System Design: An Introduction to State-Space Methods" wrote himself). If you haven't found the necessary information about the book — write in the comments, we will try to find it.
Bernard Friedland: author's other books
Who wrote Control System Design: An Introduction to State-Space Methods? Find out the surname, the name of the author of the book and a list of all author's works by series.


Control System Design: An Introduction to State-Space Methods — read online for free the complete book (whole text) full work
Below is the text of the book, divided by pages. System saving the place of the last page read, allows you to conveniently read the book "Control System Design: An Introduction to State-Space Methods" online for free, without having to search again every time where you left off. Put a bookmark, and you can go to the page where you finished reading at any time.
Font size:
Interval:
Bookmark:
Matrices are widely applied in many branches of contemporary engineering, ranging from stress analysis, to electrical circuits, to engineering economics. An engineering curriculum without an introduction to matrix theory is difficult to conceive.
This appendix is not intended as a substitute for a text on matrices and their applications in engineering; there are many excellent texts available for this purpose. Rather it is intended as a concise summary of the facts about matrices that the reader will need to know in reading this book. Having them all at hand will minimize the need to consult a standard reference book. It also serves to define the notation and terminology which are, regrettably, not entirely standard.
While some derivations and proofs are given to provide motivation and insight, no attempt has been made at proving or even justifying every statement that is made. The interested reader is urged to consult a suitable textbook for details of proof, for other properties of matrices, and for many additional applications.
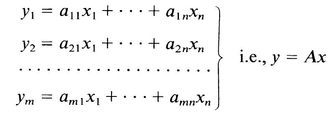
Consider a system of linear equations
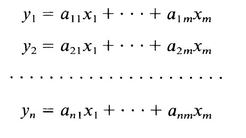
(A.1)
To reduce the amount of writing, (A.1 ) can be expressed as

(A.2)
The arrays of numbers enclosed by the square brackets are known as matrices. In general a rectangular array having m columns and n rows, of the form
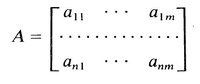
(A.3)
is called an n m matrix. A single letter A is used to designate the entire n m matrix. The matrices in (A.2) having only one column, namely
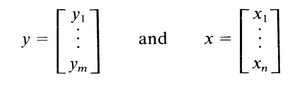
(A.4)
are generally called vectors . (The three-dimensional vectors of classical physics are special cases of the general mathematical vectors used in this book. When, as in Chap. 3, we want to refer specifically to a physical vector such as force or velocity, we use an arrow over the letter, viz.,  )
)
Since a vector is a 1 n matrix, any result that applies to all n m matrices also applies to vectors. As is customary in texts on systems, vectors are generally denoted by lowercase letters and other matrices are generally denoted by capital letters.
In terms of the notation introduced above, the system of linear equations (A.1) can be written simply as

(A.5)
Equation (A.5) can be read as (the vector) y is the result of multiplying (the vector) x by (the matrix) A . Thus we have defined the operation of multiplying a vector by a matrix, as the equivalent of the system of linear equations (A.1). Multiplying a vector by a matrix is a special case of multiplying one matrix by another. We shall consider this operation and others in the next section.
A 1 x 1 matrix (i.e., a single component vector) which is just a single number, is known as a scalar .
To save writing, the matrix A is sometimes exhibited as
A = [ a ij ]
where a ij is a typical element of the matrix A.
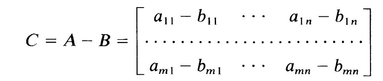
Addition and subtraction Matrices can be combined by use of the operations of addition, subtraction, and multiplication in much the same manner as scalars. These operations may be defined in terms of systems of simultaneous equations. Thus, suppose

(A.6)
and
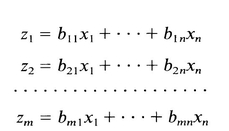
(A.7)
then, adding each equation in (A.6) to the corresponding equation in (A.7) gives

or, in the matrix shorthand,
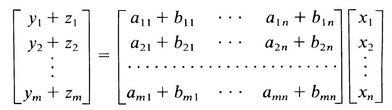
or
y + z = (A + B)x = Cx
where
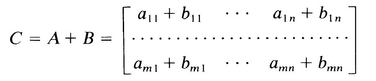
(A.8)
Thus each term in the sum of two matrices is the sum of the corresponding elements of the summands. It is clear from the definition that two matrices can be added only when they are both of the same dimensions: m n , and, when A + B is defined,

(A.9)
Subtraction of two matrices is defined by
(A.10)
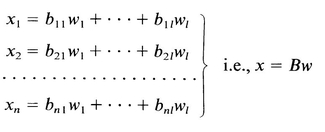
Multiplication Multiplication of matrices is defined in terms of substitution of one linear system of equations into another. Consider
(A.11)
and
(A.12)
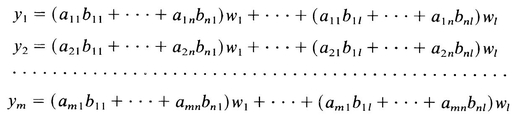
Substitute (A.11) into (A.12) to obtain

(A.13)
Collecting coefficients of the wi in (A.13) gives
(A.14)
or
where

(A.15)
Now, since in shorthand notation (A.11) and (A.12) are
y = Ax and x = Bw
we can write
y = A ( Bw ) = ABw = Cw
Font size:
Interval:
Bookmark:
Similar books «Control System Design: An Introduction to State-Space Methods»
Look at similar books to Control System Design: An Introduction to State-Space Methods. We have selected literature similar in name and meaning in the hope of providing readers with more options to find new, interesting, not yet read works.
Discussion, reviews of the book Control System Design: An Introduction to State-Space Methods and just readers' own opinions. Leave your comments, write what you think about the work, its meaning or the main characters. Specify what exactly you liked and what you didn't like, and why you think so.