Gareth J. Monkman - Soft Robotics
Here you can read online Gareth J. Monkman - Soft Robotics full text of the book (entire story) in english for free. Download pdf and epub, get meaning, cover and reviews about this ebook. City: Singapore, year: 2022, publisher: Bentham Science Publishers, genre: Science. Description of the work, (preface) as well as reviews are available. Best literature library LitArk.com created for fans of good reading and offers a wide selection of genres:
Romance novel
Science fiction
Adventure
Detective
Science
History
Home and family
Prose
Art
Politics
Computer
Non-fiction
Religion
Business
Children
Humor
Choose a favorite category and find really read worthwhile books. Enjoy immersion in the world of imagination, feel the emotions of the characters or learn something new for yourself, make an fascinating discovery.
- Book:Soft Robotics
- Author:
- Publisher:Bentham Science Publishers
- Genre:
- Year:2022
- City:Singapore
- Rating:3 / 5
- Favourites:Add to favourites
- Your mark:
Soft Robotics: summary, description and annotation
We offer to read an annotation, description, summary or preface (depends on what the author of the book "Soft Robotics" wrote himself). If you haven't found the necessary information about the book — write in the comments, we will try to find it.
This reference is a guide to materials and systems used in soft robotics. If features 6 chapters contributed by robotics experts that review fundamental and applied topics that are important for understanding the requirements of soft robotics design projects and the physics of the polymers involved. Chapters are organized for easy reading and include references.
The topics include:
- Aspects of materials processing and engineering for the development of soft robotic devices
- A review on biological gripping principles and their application to robotics
- Information about self-sensing electroadhesive polymer grippers with magnetically controllable surface geometry
- Theoretical and experimental investigations of magnetic hybrid materials
- Modeling and dynamic analysis of a novel rotary soft robotic arm by transfer matrix method
- Design and control of a portable continuum robot for pipe inspection assisted by a rigid manipulator
This book is a suitable reference for scholars and engineers who are seeking knowledge about materials and design principles in soft robotics with its practical applications.
Gareth J. Monkman: author's other books
Who wrote Soft Robotics? Find out the surname, the name of the author of the book and a list of all author's works by series.


Soft Robotics — read online for free the complete book (whole text) full work
Below is the text of the book, divided by pages. System saving the place of the last page read, allows you to conveniently read the book "Soft Robotics" online for free, without having to search again every time where you left off. Put a bookmark, and you can go to the page where you finished reading at any time.
Font size:
Interval:
Bookmark:
Shib Shankar Banerjee
The development of soft materials for various smart applications, such as in soft robotic devices derived from elastomers, naturally occurring rubbers and polymers, can be traced back to 1940s. Contrary to conventional robotics, soft robotic research was primarily dedicated to reproducing and mimicking the elasticity and compliance of biological substrates. In the last few decades, however, subsequent progress in soft robotic devices and manipulators has been witnessed within the subcategories of material & processing, sensor and actuators. In this chapter, a comprehensive introduction to soft robotics engineering is highlighted exclusively from the perspective of materials development. Soft material prototypes are eventually exploited towards designing biomimetic prosthetic devices with sensing capabilities and soft actuating bodies. We present an elaborate discussion on soft materials engineering, including elastomers, polymer composites containing fillers and associated processing methodologies. Despite high flexibility and inherent biocompatibility, conventional soft elastomer-based (silicone and polyurethane) matrices often suffer from either poor mechanical strength or reduced mechanical output at higher temperatures. This review briefly summarizes and critically discusses the different types of compliant materials, i.e. elastomers, fluids, gels and others, which are currently being employed in soft robotics. This chapter also highlights new opportunities and paves some potential avenues to address several challenges, particularly the ones concerning and soft robotic materials. Moreover, utilization of soft rubber for sensors and other applications could ameliorate the versatility of soft material applications. Therefore, challenges and future direction in soft robotics research have to be explicitly integrated within the subdomain of materials development and processing and, therefore, addressed in-depth in this chapter, with an emphasis on autonomous soft robotic arms capable of stimuli-responsive operations.
A robot is an automatically controlled, programmable machine having desired abilities to execute movement, perception, and cognition []. These can bear and support high loading and sustain reliable electrical and mechanical properties under extreme conditions (see chapter 1, Zimmermann et al.). However, in order to create universal and customizable machines capable of performing a wide range of tasks inspired by nature, robots built from soft materials need to be engineered. Furthermore, there is no single machine versatile enough to adequately perform all possible tasks.
Soft robotics is an advanced and sophisticated area of robotics dealing with building robots from easily deformable and highly compliant materials such as fluids, gels, and soft elastomers []. Unlike a rigid finger made of metal and semirigid plastics, the use of a compliant material for such applications will be advantageous for several reasons. During object manipulation, a finger made of soft matter will not leave marks on the objects, and its grasping stability will be enhanced. Finally, repetitive strain can be eliminated. However, development of electronic/mechanical skin-based materials mimicking human skin is very challenging.
Considerable progress has been made in recent years in the field of soft robotics, with efforts focused on novel methods of actuation, sensing, design and fabrication []. However, these pioneering research works do not specifically discuss in depth the soft and compliant materials for robotic system applications. Therefore, the aim of this review is to serve (as an essential background or state-of-the-art) as a guide to materials for the researchers who are working on soft robotics and the corresponding sub-research areas. This review briefly summarizes and critically discusses the different types of compliant materials, such as, elastomers, fluids, gels and others, which are currently being used in soft robotics. This review will also highlight new opportunities and pave some potential avenues to address the robotic materials challenges. As the dynamic response of the soft materials are often very nonlinear in nature with many degrees of freedom, specific material modeling and development of the constitutive relations for the soft materials as well as their characterization are very crucial to the design of soft robotic components. Therefore, this review also includes a comprehensive survey on the various existing analytical modeling approaches (e.g., pseudo-rigid body model, reduced order model, etc.) used for small-scale deformations and relatively simple geometries as well as numerical modeling based on the finite element analysis (FEA) used for large-scale deformations and the design of relatively complex robotic components. Finally, current challenges and prospects of soft materials and their dynamics for robotic application are critically discussed.
The softness of a matter or device is generally measured according to its compliance value []. Therefore, the materials in conventional robots have higher rigidity (310 orders of magnitude higher) than the materials in natural organisms. This mismatch in mechanical compliance is one of the major factors for the incompatibility of conventional robots for intimate human interaction.
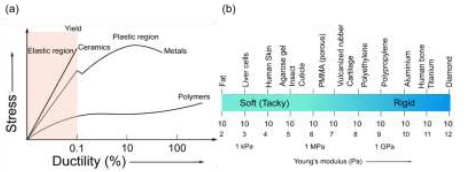
(a) Elastic properties, yield behavior, and plastic deformation of various materials, (b) Youngs modulus of various classes of materials (the transition from soft to rigid materials) [].
An elastomer is a type of amorphous crosslinked polymer of low glass-transition temperature, which has a unique property of elasticity along with low elastic modulus and high failure strain [] since its stress-strain response is typically nonlinear and their elastic strain can completely recover over a period of time after removal of a transient load. Elastomers are also considered to be hyperelastic materials since they can respond elastically when subjected to very large strains.
Elastomers are the most potentially promising materials for soft robotics due to their low elastic moduli, very high stretchability and high elastic resilience. The elastic modulus of elastomers is typically in the range of 0.1-10 MPa, although soft robots are normally composed of highly deformable and compliant materials which typically have moduli in the range 0.1-1.0 MPa [). The balance between high flexibility and enhanced fracture toughness in commercially available elastomers will eventually provoke practical implications for future innovative materials for soft robotics.
Font size:
Interval:
Bookmark:
Similar books «Soft Robotics»
Look at similar books to Soft Robotics. We have selected literature similar in name and meaning in the hope of providing readers with more options to find new, interesting, not yet read works.
Discussion, reviews of the book Soft Robotics and just readers' own opinions. Leave your comments, write what you think about the work, its meaning or the main characters. Specify what exactly you liked and what you didn't like, and why you think so.