William Tyrrell Thomson - Introduction to Space Dynamics
Here you can read online William Tyrrell Thomson - Introduction to Space Dynamics full text of the book (entire story) in english for free. Download pdf and epub, get meaning, cover and reviews about this ebook. year: 1986, publisher: Dover Publications, genre: Children. Description of the work, (preface) as well as reviews are available. Best literature library LitArk.com created for fans of good reading and offers a wide selection of genres:
Romance novel
Science fiction
Adventure
Detective
Science
History
Home and family
Prose
Art
Politics
Computer
Non-fiction
Religion
Business
Children
Humor
Choose a favorite category and find really read worthwhile books. Enjoy immersion in the world of imagination, feel the emotions of the characters or learn something new for yourself, make an fascinating discovery.
- Book:Introduction to Space Dynamics
- Author:
- Publisher:Dover Publications
- Genre:
- Year:1986
- Rating:4 / 5
- Favourites:Add to favourites
- Your mark:
Introduction to Space Dynamics: summary, description and annotation
We offer to read an annotation, description, summary or preface (depends on what the author of the book "Introduction to Space Dynamics" wrote himself). If you haven't found the necessary information about the book — write in the comments, we will try to find it.
William Tyrrell Thomson: author's other books
Who wrote Introduction to Space Dynamics? Find out the surname, the name of the author of the book and a list of all author's works by series.




Introduction to Space Dynamics — read online for free the complete book (whole text) full work
Below is the text of the book, divided by pages. System saving the place of the last page read, allows you to conveniently read the book "Introduction to Space Dynamics" online for free, without having to search again every time where you left off. Put a bookmark, and you can go to the page where you finished reading at any time.
Font size:
Interval:
Bookmark:
A system of linear equations
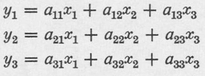
(A1)
can be arranged into the matrix notation
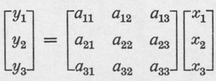
(A2)
where the rule for the matrix multiplication is evident from the original equations. For Eq. A2 to equal Eq. A1, the terms of each row must be multiplied by the terms of the column x1, x2, x3. We can then view the matrix equation, Eq. A2, as a convenient notation which may be further abbreviated to

(A3)
We will next consider another set of linear equations like that of Eq. A1, relating x to z , and write its matrix form as
(A4)
where [ b ] is a square matrix like that of Eq. A2. If we wish to relate y to z , Eq. A4 can be substituted into Eq. A3 as follows:
(A5)
The elements of [c] can then be shown to be available from the equation
(A6)
i.e., the third element of the second row is
c 23 = a 21 b 13 + a 22 b 23 + a 23 b 33
There are many theorems relating to the manipulation of matrix equations; however for the purposes of linear transformation of coordinates, as treated in this text, the simple algebraic concepts discussed above are sufficient.
- Frazer, R. A., W. J. Duncan, and A. R. Collar, Elementary Matrices, Cambridge University Press, New York (1938).
- Pipes, L. A., Applied Mathematics for Engineers and Physicists, 2nd ed., McGrawHill Book Co., New York (1958), Chap. 4.
We occasionally encounter a quantity which has nine components in a threedimensional space. In elasticity we encounter nine components of stress at a point, whereas in dynamics we find nine components of inertia.
For our purposes we can define a dyadic as a ninecomponent quantity which can be formed by multiplying two vectors, ignoring the dotor crossproduct rule. Thus the product of two vectors a and b is,
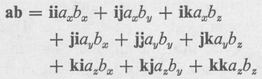
(B1)
Although the above dyadic was formed by the multiplication of the two vectors a and b, the elements of the dyadic (called dyads) need not be related to the two vectors. Furthermore, it is convenient to arrange such terms in matrix form, so that a dyadic is in general expressible as,
(B2)
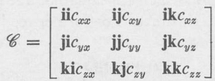
As an example of a dyadic not related to any vector, we have the inertia dyadic,
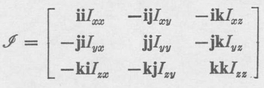
(B3)
To illustrate the general rule for the dot or cross product of a dyadic with a vector, we assume that the dyadic is formed by the product of two vectors as

(B4)
Its dot and cross product with a vector r is then dependent on the order of the product, and its interpretation is made clear by the following examples:

(B5)

(B6)

(B7)

(B8)
If we form the dot product of the inertia dyadic with the angular velocity vector = x i + y j + z k , the result will be the angular momentum vector.
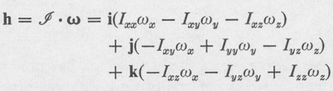
(B9)
Here we encounter dot products such as,
ji i = j ( i i ) = j
ji j = j ( i j ) = 0, etc.
which are evident from the general rule, and recognize that the subscripts of the inertia are interchangeable, i.e., I xy = I yx . If, furthermore, we dot the angular velocity vector into the angular momentum vector, the result is a scalar, which in this case is twice the kinetic energy.
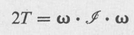
(B10)
In summary, the dyadic is a special form of a tensor; however, our simple definition of the dyadic and its product with a vector requires no new rules of vector algebra, which appears to be adequate for the dynamical problems encountered in this text. For further reading on the subject, see reference.
Weatherburn, C. E., Advanced Vector Analysis, G. Bell & Sons, Ltd., London (1947), Chapter 5, and p. 207.
Many problems in Dynamics are formulated in terms of maxima and minima of quantities expressed by an integral. In this section we will briefly discuss the essentials of the variational calculus which are encountered for such problems.
Consider the integral,
(C1)
taken along a curve z = ( t ). The quantity z can stand for any number of variables, such as position x , y , and the thrust attitude of the missile problem. The value of the integral I will depend on the curve z = ( t ) which we wish to find for the condition of maxima or minima of the integral C1.
Assuming that z = ( t ) along curve ab of to be the optimum curve, we draw curve 1 along ab 1 as the varied curve. The quantity z along the varied curve is represented by

Font size:
Interval:
Bookmark:
Similar books «Introduction to Space Dynamics»
Look at similar books to Introduction to Space Dynamics. We have selected literature similar in name and meaning in the hope of providing readers with more options to find new, interesting, not yet read works.
Discussion, reviews of the book Introduction to Space Dynamics and just readers' own opinions. Leave your comments, write what you think about the work, its meaning or the main characters. Specify what exactly you liked and what you didn't like, and why you think so.